
Research Highlight (이지윤 교수)
- 다중 안테나 기반 데이터 보상을 통한 GNSS RO 전리권 전자밀도 산출 기법 -

< KAIST AE 이지윤 교수 >
이번 리서치 하이라이트에서는 2024년 8월에 IEEE Transactions on Geoscience and Remote Sensing(IEEE TGRS)에 게재된 장혜연 박사의 (이지윤 교수님 연구실 졸업) “다중 안테나 기반 데이터 보상을 통한 GNSS RO 전리권 전자밀도 산출 기법 연구”를 소개한다. (DOI: 10.1109/TGRS.2024.3449337)
Global Navigation Satellite System (GNSS) radio occultation, 줄여서 GNSS RO는 저궤도 (LEO, Low Earth Orbit) 위성에서 수신된 GNSS 신호의 굴절과 지연 정도를 기반으로, 전리권을 포함한 지구 대기권을 관측하는 원격탐사 기술이다. 기존 다른 전리권 관측기기와 비교하여 전 지구적 범위, 그리고 고도에 대한 높은 해상도의 관측이 가능하다는 장점이 있기 때문에 우주 환경, 전리권 연구분야에서 활용도가 증가하고 있다.
해외에서는 독일에서의 Challenging Minisatellite Payload (CHAMP), 독일/미국 공동으로 Gravity Recovery and Climate Experiment (GRACE), 그리고 미국/대만 공동으로 Constellation Observing System for Meteorology, Ionosphere and Climate (COSMIC)과 같은 RO 시스템들이 개발되었고, 한국도 GNSS RO 데이터를 활용하기 위해 다목적실용위성 5호, Korea Multi-Purpose Satellite-5 (KOMPSAT-5)에 RO 수신기를 탑재하여 운용 중에 있다.
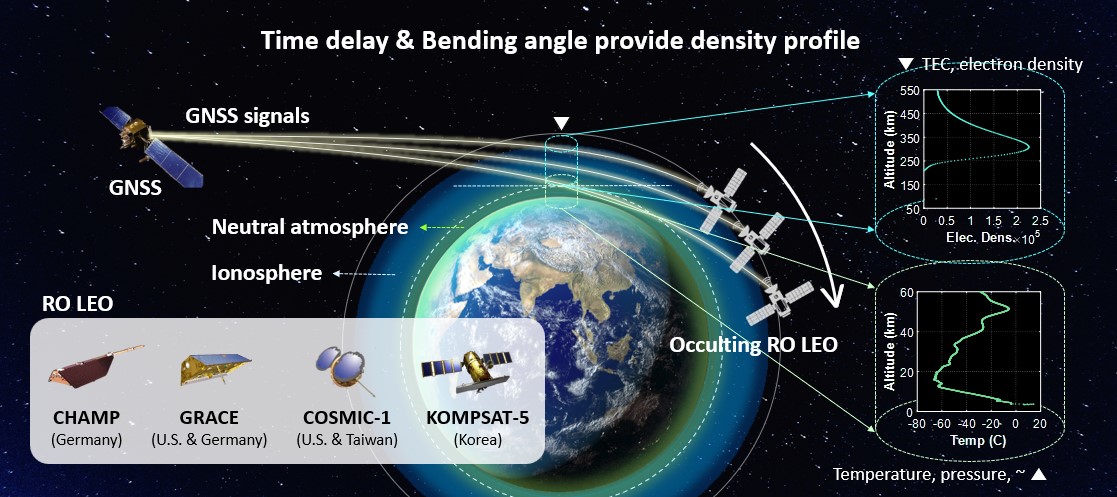
< 그림 1. GNSS RO 기법의 구성도, RO 미션, 및 관측 대기 정보 >
그림 2는 GNSS RO 기법의 2차원 구조를 보여준다. GNSS 위성과 저궤도 위성(LEO)을 잇는 직선 거리와 관련해, 저궤도 위성 z축 기준으로 고도각(elevation)이 음수인 영역을 “엄폐 측면(occultation side)”, 양수인 영역을 “비엄폐 측면 (non-occultation side)”이라고 정의한다.
저궤도 위성에서 수신한 GNSS 신호는 A와 C 사이의 전체 전리권 정보를 모두 포함하고 있다. 그러나 전자밀도 수직분포 산출에 있어 주요 관심 영역은 저궤도 위성 고도 내의 정보 (below LEO), 즉 BC 구간이다. 이를 얻기 위해, AC 전체 정보에서 AB 구간(저궤도 위성 고도 위쪽 전리권 정보)를 제거하는 보정(calibration) 과정이 필요하다.
초기에는 저궤도 위성 고도 위쪽 전리권 정보를 모델링하거나, 저궤도 위성 고도 아래쪽 정보를 기반으로 외삽하여 보정을 수행하였다. 이후, 동일한 GNSS 신호를 하나의 저궤도 위성 안테나로 엄폐 측면과 비엄폐 측면에서 연속적으로 관측할 수 있는 경우 엄폐 측면 관측치에서 비엄폐 측면 관측치를 빼 주는 새로운 보정 방법이 제안되었다. 이 방법은 보정 과정을 보다 간단하고 정확하게 수행할 수 있게 하였다.
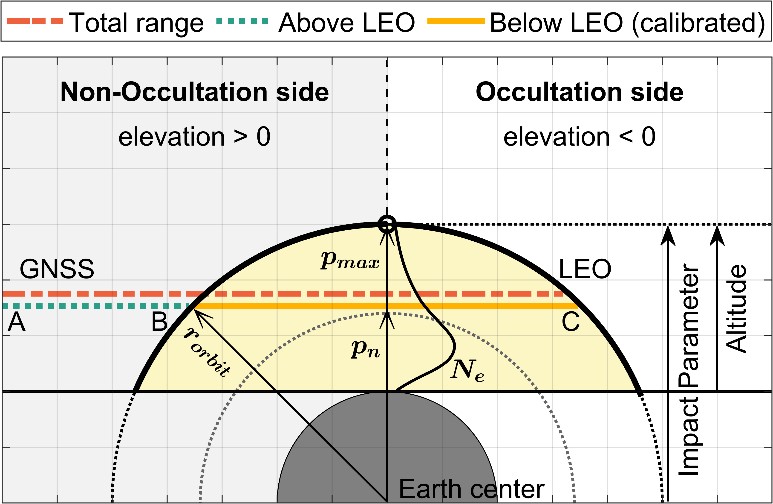
< 그림 2. GNSS RO 기법의 2차원 구조 >
하지만 앞서 설명한 보정 기술은 전리권 전자밀도 수직분포 산출에 사용되는 저궤도 위성 안테나가 비엄폐 측면 관측을 수행할 수 있는 경우에만 적용할 수 있다. 비엄폐 측면 관측 가능성은 안테나의 시야에 따라 달라진다.
RO 임무에는 두 가지 주요 유형의 안테나가 사용된다. 정밀 궤도 결정(precise orbit determination, POD) 안테나와 엄폐(RO) 안테나(occultation antenna) 이다. POD 안테나는 저궤도 위성의 정확한 궤도를 결정하는 데 사용되며, RO 안테나는 대기 및 전리권 수직분포를 추출하는 데 사용된다.
그림 3은 다양한 임무에서 사용된 안테나 배치와 관측 범위를 간략히 보여준다. CHAMP, GRACE, MetOp-A, 그리고 KOMPSAT-5의 POD 안테나는 천정(zenith) 방향으로 장착되어 있다. 반면, COSMIC-1과 COSMIC-2의 POD 안테나는 천정에서 약 75° 기울어진 방향으로 장착되어 있어, 이를 전리권 전자밀도 수직분포 산출에 사용한다. 또한 COSMIC 위성의 POD 안테나는 동일한 GNSS 위성을 엄폐 및 비엄폐 측면에서 연속적으로 추적할 수 있으므로, 앞서 설명된 보정 기술을 적용할 수 있다.
그러나 CHAMP, GRACE, MetOp-A, 그리고 KOMPSAT-5는 RO 안테나(occultation antenna)를 사용하여 전리권의 수직분포를 관측하지만, RO 안테나는 엄폐 측면(음수 고도각)만 관측 가능하므로 비엄폐 측면 관측이 제한된다. 이러한 제한으로 인해 이들 임무에서는 앞선 보정 기술을 적용하기 어렵다.
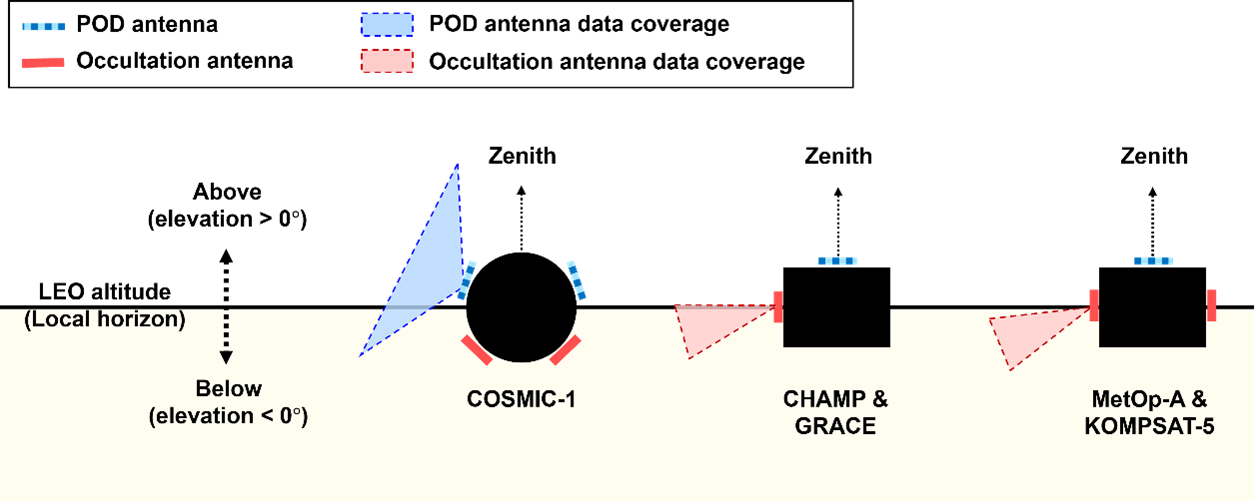
< 그림 3. RO 미션 별 안테나 배치 및 관측 범위 >
본 연구에서는 POD 안테나가 비엄폐 측면에서 엄폐 측면에서 RO 안테나로부터 추적된 GNSS 위성과 동일한 위성을 추적할 수 있음을 확인하였다. 이러한 관찰을 바탕으로, 본 연구는 POD와 RO 안테나의 관측 데이터를 연결하여 데이터 공백을 보완하는 다중 안테나 기반 데이터 보상 방법을 제안한다. 제안된 방법은 KOMPSAT-5 데이터에 적용되었고, 이를 통해 KOMPSAT-5로부터 최초로 전리권 전자밀도 수직분포를 추출하였다. 추출된 결과는 이오노존데(ionosonde) 데이터와 비교하여 검증이 이루어졌으며, 검증 결과 제안된 방법이 전자 밀도 수직분포를 신뢰성 있게 산출할 수 있음을 확인하였다.
그림 4의 윗줄은 COSMIC-1, CHAMP, 그리고 KOMPSAT-5 위성에서 하루 동안 수집된 POD와 RO 안테나 데이터의 고도각(elevation) 분포를 보여준다. COSMIC-1의 경우, POD 안테나가 천정 방향에서 기울어진 방향으로 설치되어 있어, 비엄폐 측면(양수 고도각)과 엄폐 측면(음수 고도각)을 모두 관측할 수 있다. 반면, CHAMP와 KOMPSAT-5의 경우 RO 안테나가 엄폐 측면만 관측하지만, POD 안테나가 비엄폐 측면을 관측할 수 있음을 확인할 수 있다.
그림 4의 아래쪽은 GNSS 위성을 추적하여 얻은 고도에 따른 총전자량(TEC, Total Electron Content) 프로필을 보여준다. COSMIC-1의 경우, 엄폐 측면 TEC로부터 비엄폐 측면 TEC를 빼서 보정된 TEC를 계산할 수 있다. CHAMP와 KOMPSAT-5의 경우, POD 안테나에서 수집된 비엄폐 측면 TEC 정보를 활용하여, RO 안테나에서 수집된 엄폐 측면 TEC에서 이를 빼주는 방식으로 보정을 수행할 수 있음을 확인하였다.
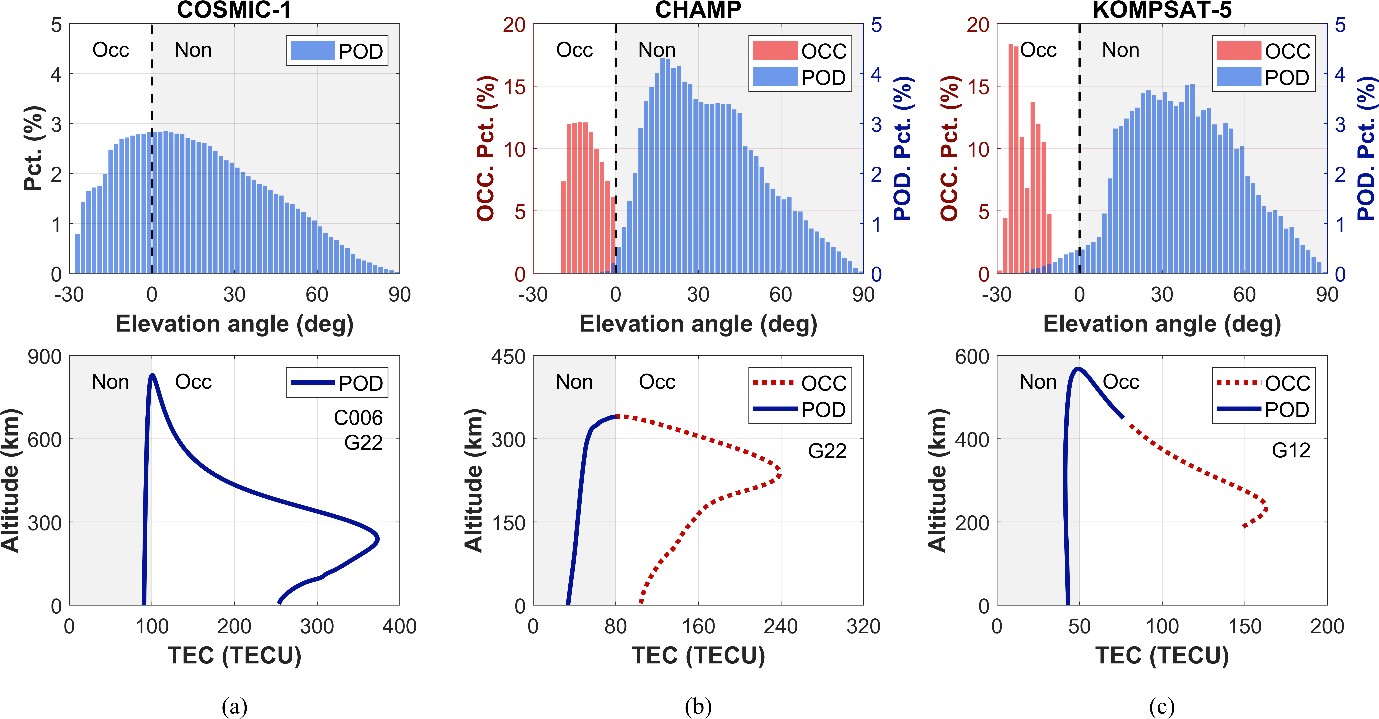
< 그림 4. POD 및 RO 안테나의 비엄폐(회색) 및 엄폐(흰색) 측면 데이터 범위, 고도각 분포 및 총전자량 >
위의 데이터 분포 분석을 통해 POD 안테나 데이터를 활용하여 비엄폐 측면 관측을 보완하고 보정 기술을 가능하게 하는 것을 확인하였다. 이를 기반으로, 새로운 보정 알고리즘을 아래 그림 5와 같이 제안하였다. 제안된 알고리즘은 POD 안테나와 RO 안테나에서 수집된 RINEX(Receiver Independent Exchange Format) 데이터, 그리고 GNSS 위성과 저궤도 위성의 위치 정보를 입력값으로 사용한다.
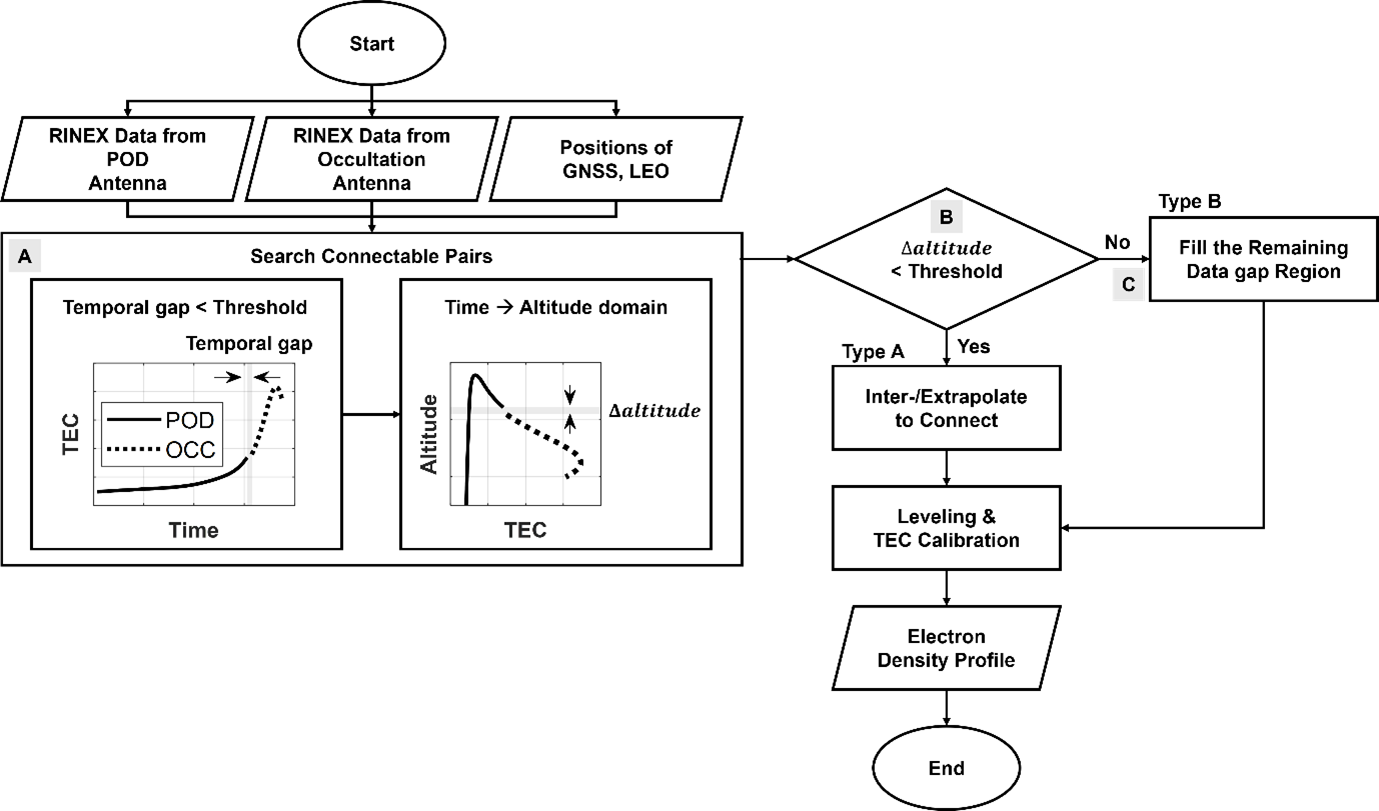
< 그림 5. 다중 안테나 기반 데이터 보상을 통한 전리권 전자밀도 산출 기법의 순서도 >
먼저, POD 안테나와 RO 안테나 데이터의 연결이 가능한 조합(pair)이 있는지 찾는 과정을 수행한다 (A단계). 이후, POD 안테나 데이터와 RO 안테나 데이터 간의 고도 차이를 기준으로 데이터를 A타입과 B타입으로 분류한다 (B단계).
그림 6은 A타입(a)과 B타입(b)의 예시를 보여준다. A타입의 경우, POD 안테나 데이터(검은 실선)와 RO 안테나 데이터(검은 점선) 사이의 고도 차이가 특정 임계값보다 작은 경우를 말한다. 이 경우, 외삽법을 사용하여 두 데이터를 연결하며, 두 데이터 간의 편향(bias)은 레벨링(leveling)을 통해 수정한다. 이를 통해, 최종적으로 POD 안테나 데이터와 연결된 RO 안테나 데이터(보라색 실선)을 얻을 수 있다.
반면, B타입(6a)처럼 POD와 RO 안테나 데이터 사이의 고도 차이가 큰 경우, 단순히 외삽법만으로 데이터 연결하면 오차가 클 수 있다. 이를 해결하기 위해, 모델링 기법을 추가적으로 적용하여 두 데이터를 효과적으로 연결하는 방법을 제안하였다. 이 과정은 그림 5에서 제시된 C단계에 해당된다.
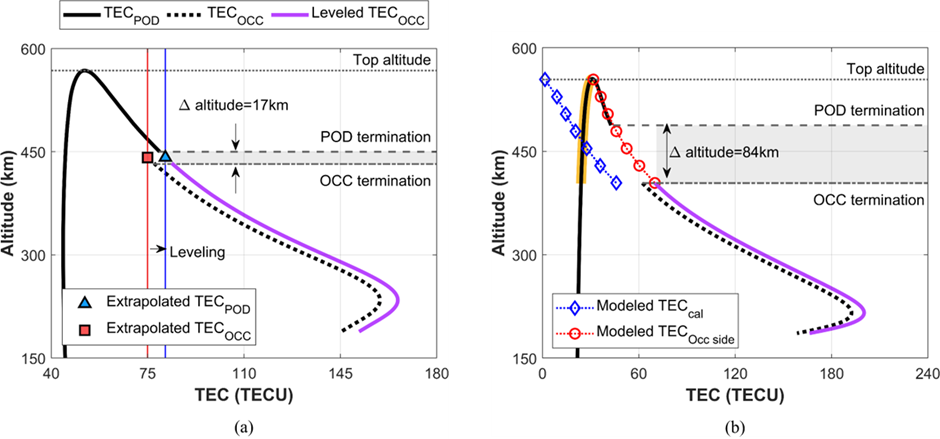
< 그림 6. KOMPSAT-5에서 관찰된 두 가지 유형의 예시: (a) A타입, (b) B타입 >
이 모델링 과정에서는, 전자밀도 수직 분포 내에서 전자밀도의 최고값(NmF2), 최고값이 나타나는 높이(hmF2), 그리고 기울기(H)를 모델 파라미터로 사용한다.
먼저, 모델을 통해 계산된 TEC 값과 POD 안테나로부터 얻은 TEC 값의 차이를 평가한다. 동시에, 모델에 의해 생성된 전자밀도 수직분포의 기울기가 두 데이터(POD와 RO 안테나) 사이에서 부드럽게 연결(smooth connection) 되는지를 확인한다.
이 과정을 통해 가장 최적의 모델 파라미터 값을 결정하며 (그림 7), 결정된 모델은 그림 6b의 파란선과 빨간 선처럼 POD 안테나 데이터와 RO 안테나 데이터를 효과적으로 연결하는 데 사용된다.
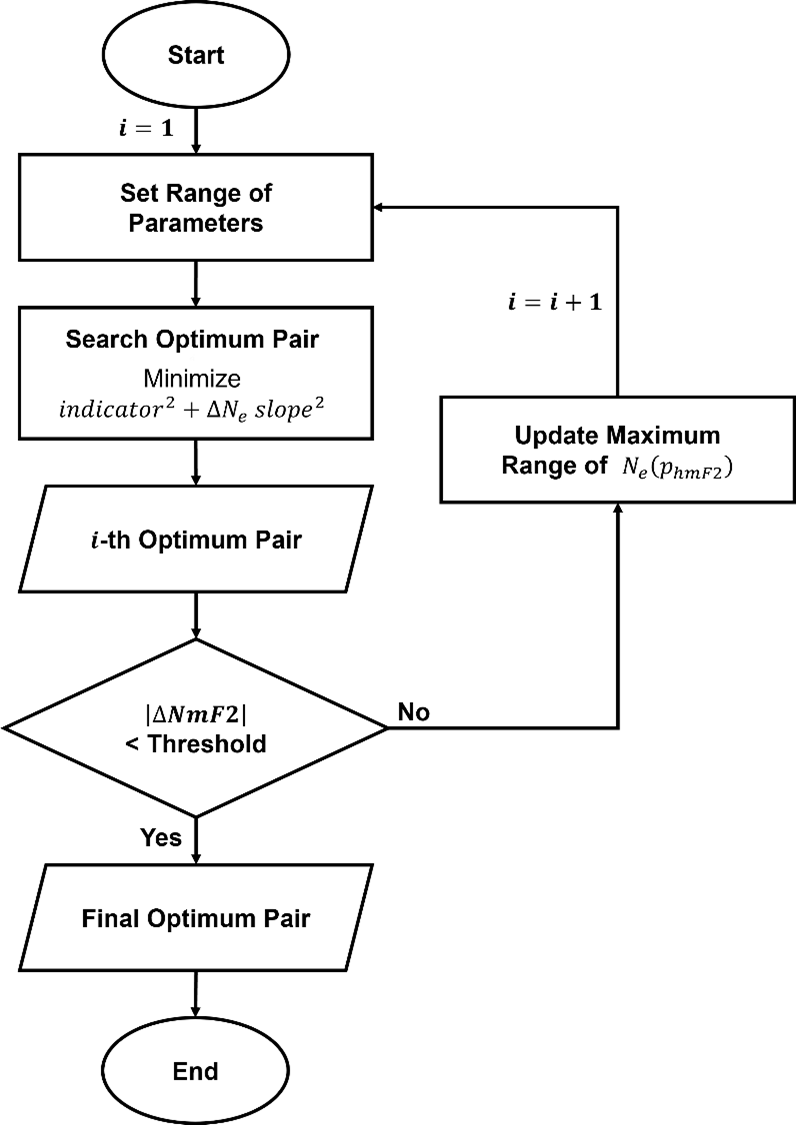
< 그림 7. 모델 파라미터의 최적 조합 탐색을 위한 순서도 >
그림 8은 본 연구에서 개발한 알고리즘을 KOMPSAT-5 RO 데이터에 적용하여 산출한 전자밀도를 이오노존데 관측 데이터와 비교한 검증 결과를 보여준다.
KOMPSAT-5에서 산출된 전리권 매개변수(NmF2, hmF2)를 이온존데 데이터와 비교 분석한 결과, NmF2는 상관계수 0.96으로 이오노존데 관측치와 매우 높은 일치를 보였으며, 평균 차이는 다른 RO 미션과 유사한 수준이었다. hmF2의 경우에도 선형 관계는 명확했지만, 상관계수는 0.63으로 NmF2에 비해 다소 낮았다. hmF2의 낮은 상관계수는 이오노존데에서 hmF2 산출 시 사용하는 알고리즘의 성능 한계 때문일 가능성이 있다. hmF2의 평균 차이는 기존 다른 미션 결과와 비슷한 범위 내에 있었다.
전반적으로, KOMPSAT-5 데이터를 활용한 전리권 매개변수 산출 결과는 기존 RO 미션과 동등한 수준의 정확도를 보였으며, 또한 본 연구에서 제안한 방법의 신뢰성을 입증했다.

< 그림 8. KOMPSAT-5 관측치와 이오노존데 관측치에서 도출된 전리권 매개변수 (NmF2, hmF2) 비교: 산점도 및 차이 분포 분석 >
본 연구에서는 비엄폐 측면 관측이 부족한 RO 미션에 대해, POD 안테나와 RO 안테나의 관측 데이터를 연결하고 그 사이의 공백을 모델링하는 다중 안테나 기반 데이터 보상을 통한 전리권 전자밀도 산출 기법에 대해 제안하였다. 제안된 방법은 KOMPSAT-5 데이터에 알고리즘을 적용하여 산출된 전자밀도 값을 이오노존데 관측 데이터와 비교 분석함으로써 검증되었다.
제안된 기법을 통해 도출된 전리권 매개변수는 이오노존데 관측 결과와 높은 일치를 보였으며, 이를 통해 POD와 RO 안테나의 관측 데이터를 연결하여 저궤도 위성 고도 이상의 전리권 정보를 효과적으로 보완하고 보정할 수 있음을 증명하였다.
본 기법은 저궤도 위성 고도 밖의 전리권 정보를 보정하는 데 POD 안테나 관측 데이터를 활용할 가능성을 제시하며, KOMPSAT-5와 유사한 안테나 배치를 가진 다른 RO 임무에도 적용될 수 있다. 이를 통해 보다 많은 전리권 데이터를 확보할 수 있을 것으로 기대된다.
![]()
원문 이지윤 교수[jiyunlee@kaist.ac.kr]
편집 이승찬[aero_sc@kaist.ac.kr]
Comment 0
- Total
- 56호
- 55호
- 54호
- 53호
- 52호
- 51호
- 50호
- 49호
- 48호
- 47호
- 46호
- 45호
- 44호
- 43호
- 42호
- 41호
- 40호
- 39호
- 38호
- 37호
- 36호
- 35호
- 34호
- 33호
- 32호
- 31호
- 30호
- 29호
- 28호
- 27호
- 26호
- 25호
- 24호
- 23호
- 22호
- 21호
| No. | Subject |
|---|---|
| Notice | 자유기고 모집 |
| Notice | Fund Raising |
| 344 |
항공우주공학과 News
|
| 343 |
신규 사업 소개 (복합 화학반응을 포함한 극초음속 다원자 혼합물 유동의 입자기반 해석기법 개발)
|
| 342 |
연구실 탐방 (전기추진 및 이온빔 응용 연구실 연구실)
|
| 341 |
연구실 탐방 (Space Testing And Research 연구실)
|
| 340 |
학부생 소식 (2025 봄 해피아워 개최)
|
| 339 |
특집 인터뷰 (이동호 교수)
|
| 338 |
동문 인터뷰 (Caltech 연구원 서종은 박사)
|
| 337 |
Research Highlight (이상봉 교수)
|
| 336 |
항공우주 이야기 (민간 무인 탐사선 블루 고스트 달 착륙)
|
| 335 |
Photo Album
|
| 334 |
항공우주공학과 News
|
| 333 |
연구실 탐방 (익스트림역학 및 멀티피직스 연구실)
|