
연구실 탐방 (우주비행 임무 및 제어 연구실)
우리 연구실에서는 궤도 역학과 자세 동역학을 기반으로 우주 공간을 비행하는 우주시스템의 임무를 분석하여 효과적으로 임무를 수행하기 위한 유도제어 기술을 연구하고 있습니다. 우리 연구실에서는 아래와 같은 3개의 큰 주제와 관련된 프로젝트를 수행하면서 세부 주제를 도출하여 연구를 수행하고 있습니다.
1. 행성 탐사를 위한 궤적 설계
우리 연구실의 대표적인 연구 주제는 궤도 역학과 최적화 기법을 토대로 탐사 궤적 설계 기술을 연구하고 있습니다. 예를 들어, 지구에서 달까지 가기 위한 여러 종류의 길, 달 주위에서 달 탐사를 수행하기 위한 임무 궤도 설계, 연료를 절약하며 화성에 가는 방법, 달/화성에 착륙하는 방법 등을 주제로 연구를 수행하고 있습니다.
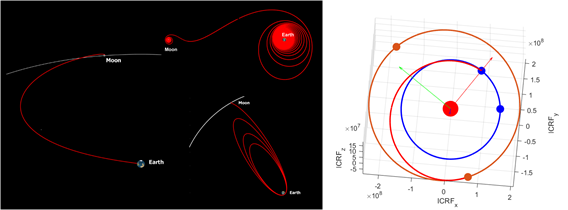
<그림 1. 지구에서 달에 가는 길 (좌), 지구에서 화성으로 가는 길 (우)>
2. 회전 운동을 위한 경로 생성 알고리즘
인공위성을 포함한 우주시스템은 다양한 목적을 위해 회전(자세) 운동을 수행하여야 합니다. 이때, 목적에 따라 주어진 조건에서 가장 빨리 회전 운동을 수행해야 경우 또는 연료를 절약하면서 회전 운동을 수행해야 할 경우가 있습니다. 또한, 인공위성을 이용해서 지구 표면을 관측하기 위해서는 회전 운동에 대한 효과적인 경로 생성이 필요하기도 합니다. 이에. 우리 연구실에서는 회전 운동을 위한 다양한 경로 생성 알고리즘을 연구하고 있습니다.
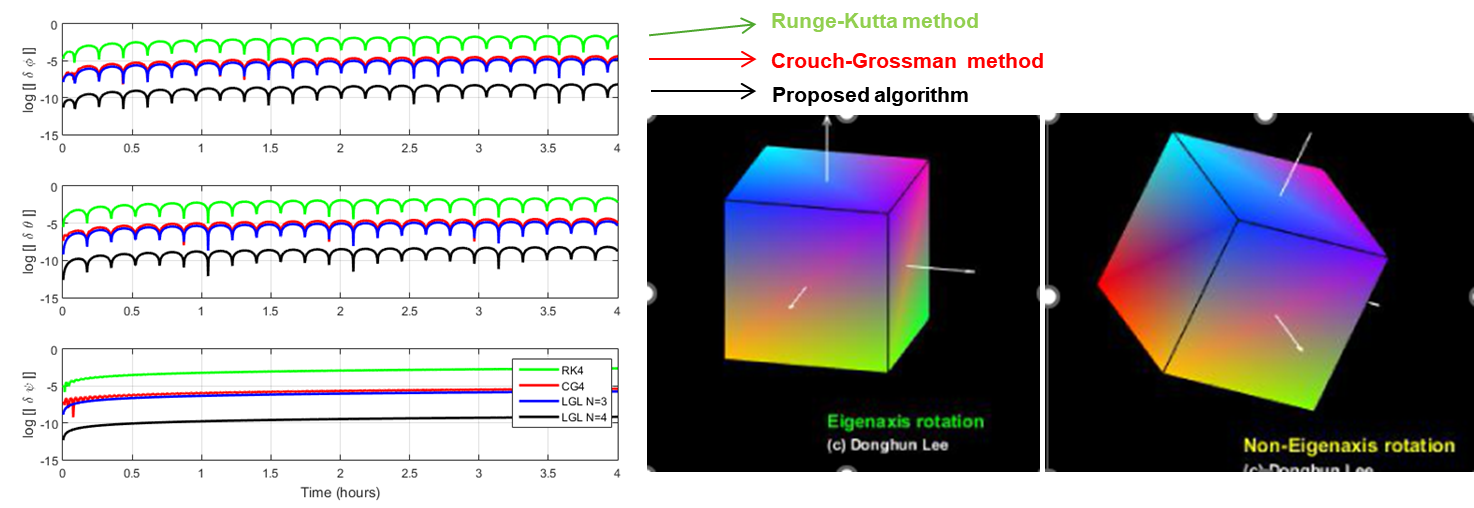
<그림 2. 회전 운동방정식의 효과적인 적분 방법(좌), 비고유축 회전 운동 해석(우)>
3. 랑데부-도킹을 위한 유도제어 알고리즘
우주 쓰레기 제거 위성, 궤도상 서비스 위성, 재사용 우주비행체, 소행성 탐사선, 지구 귀환 우주탐사선 등의 우주시스템에는 랑데부-도킹 관련 기술이 필요합니다. 이에 상대적인 궤도운동을 기반으로 랑데부-도킹을 위한 유도제어 기술을 연구하고 프로세서 및 하드웨어가 포함된 지상 시뮬레이터를 구성하여 알고리즘 검증을 위한 연구를 수행하고 있습니다.
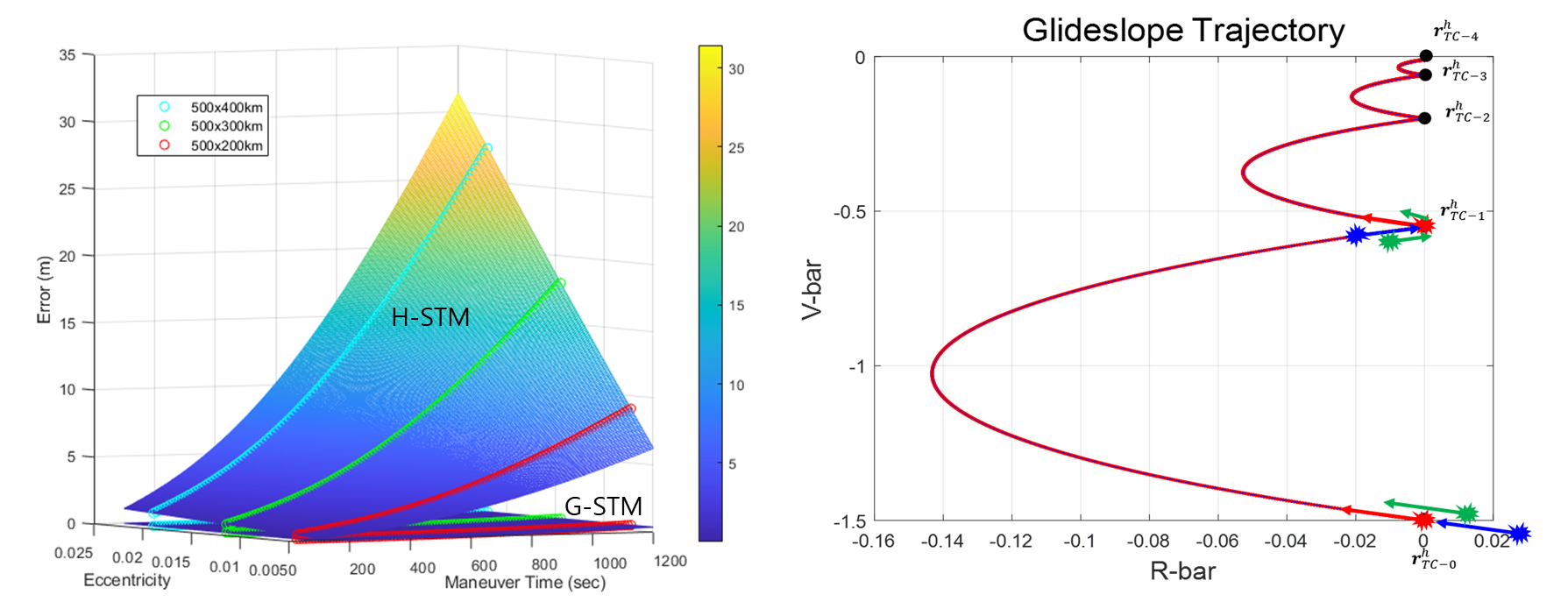
<그림 3. 근접 운영 단계에서 추력 명령 생성 알고리즘 성능 비교(좌), 목표 위성 접근을 위한 유도 알고리즘 시뮬레이션(우)>
![]()
원문 이동헌 교수[donghlee@kaist.ac.kr]
편집 이은혁[lehx01@kaist.ac.kr]
Comment 0
- Total
- 56호
- 55호
- 54호
- 53호
- 52호
- 51호
- 50호
- 49호
- 48호
- 47호
- 46호
- 45호
- 44호
- 43호
- 42호
- 41호
- 40호
- 39호
- 38호
- 37호
- 36호
- 35호
- 34호
- 33호
- 32호
- 31호
- 30호
- 29호
- 28호
- 27호
- 26호
- 25호
- 24호
- 23호
- 22호
- 21호
| No. | Subject |
|---|---|
| Notice | 자유기고 모집 |
| Notice | Fund Raising |
| 344 |
항공우주공학과 News
|
| 343 |
신규 사업 소개 (복합 화학반응을 포함한 극초음속 다원자 혼합물 유동의 입자기반 해석기법 개발)
|
| 342 |
연구실 탐방 (전기추진 및 이온빔 응용 연구실 연구실)
|
| 341 |
연구실 탐방 (Space Testing And Research 연구실)
|
| 340 |
학부생 소식 (2025 봄 해피아워 개최)
|
| 339 |
특집 인터뷰 (이동호 교수)
|
| 338 |
동문 인터뷰 (Caltech 연구원 서종은 박사)
|
| 337 |
Research Highlight (이상봉 교수)
|
| 336 |
항공우주 이야기 (민간 무인 탐사선 블루 고스트 달 착륙)
|
| 335 |
Photo Album
|
| 334 |
항공우주공학과 News
|
| 333 |
연구실 탐방 (익스트림역학 및 멀티피직스 연구실)
|