
Research Highlight (이대영 교수)
- 나선 직조 기반 고하중 소프트 그리퍼 -
항공우주 로보틱스 및 메커니즘 연구실 이대영 교수팀은 한국과학기술연구원 지능로봇연구단 송가혜 박사 연구팀과의 공동연구를 통해 130g.f의 무게로 100kg.f 이상을 파지할 수 있는 나선 직조 기반 고하중 소프트 그리퍼를 개발했다고 밝혔다. 해당 연구 성과는 Nature Communications 20203년 Vol. 14에 게재되었으며, 국내 로봇 기업 ㈜뉴로메카와 기술이전 계약을 체결하여 실용화를 준비 중에 있다.
관련 논문: G. Kang, Y.-J. Kim, S.-J. Lee, S. K. Kim, D.-Y. Lee, K. Song, "Grasping through dynamic weaving with entangled closed loops," Nature Communications, vol. 14, no. 1, pp. 4633, Aug. 2023.
관련 영상 자료: [Youtube] Soft Weaving Gripper with High payload & Adaptability https://youtu.be/QfiHDOGnhcE

< KAIST AE 이대영 교수 >
드론 택배와 같은 친숙한 예시부터, 무인 비행체 간의 공중 도킹, 그리고 최근 이슈화되고 있는 우주 잔해물 포획까지, 항공우주 시스템에 있어서 로봇 그리퍼의 활용도는 무궁무진하다. 하지만 다수의 구동기와 센서를 사용하는 일반적인 로봇 그리퍼는 무게, 부피, 내구성, 신뢰성을 담보하기 어려우며, 이는 로봇 그리퍼의 실질적인 적용을 막는 가장 큰 요소 중 하나로 작용하고 있다.
소프트 로봇 그리퍼 기술은 천, 종이, 실리콘과 같은 부드럽고 유연한 소재로 로봇 그리퍼를 제작하여 단순한 구조를 활용하면서도 포획 대상을 안전하고 효율적으로 잡을 수 있도록 하는 기술로 앞서 언급한 문제들에 대한 해결책이자, 강체로 만들어진 전통적인 그리퍼의 대안으로 제시되어 왔다. 하지만 부드러운 소재로 만들어져 무거운 물체를 들어 올리는 것이 어렵고 약한 외부 충격에도 물체를 놓치기 쉽다는 치명적인 단점 때문에 제한적으로만 활용되어 왔다.
본 연구에서는 나선 직조 (Spiral Weaving) 라는 독특한 기하 구조를 활용하여 단순하면서도 안정적인 파지가 가능한 새로운 개념의 그리퍼를 개발, 소프트 그리퍼의 성능을 극적으로 높이는 것에 성공하였다. 개발한 그리퍼는 유연한 필름 소재로 구성되어 가벼우면서도 별도의 센서 없이 하나의 구동기만을 이용하여 다양한 대상 물체를 포획할 수 있다. 특히 130 g.f의 그리퍼 무게로 100 kg.f 이상의 무게를 들어 올림으로써 그 성능을 입증하였다.
연구자들은 낱개의 실은 약하지만 직조 구조로 얽힌 직물은 무거운 물건을 안정적으로 지지할 수 있다는 사실에 주목하였다. [그림 1]은 이러한 구조에 대한 좀 더 자세한 개념을 설명하고 있다. 직조 구조는 씨실과 날실의 꼬임으로 인해 구조적 안정성을 유지한다. 이 구조는 서로 교차하면서 높이 방향의 위치 차이를 가지며, 차이는 [그림1]에서 (+) 및 (-) 부호로 나타낼 수 있다. 예를 들어, 흰색 끈은 z-축 방향에서 빨간색 끈보다 아래에 있고(-), 파란색 끈보다는 위에 있다(+). 이러한 직조 구조를 이용하여 그리퍼를 만들기 위해서는 직조 구조가 형성되고 해체되기 위한 기하학적 원리에 대한 파악이 이루어져야 한다. 본 연구에서는 이를 (1) 끈들은 선형 운동을 통해 중심으로 모이며, (2) 이 끈들은 주변 끈과 상대적인 z-축 높이 차이를 유지해야 한다는 두 가지 원리로 정리하였다.
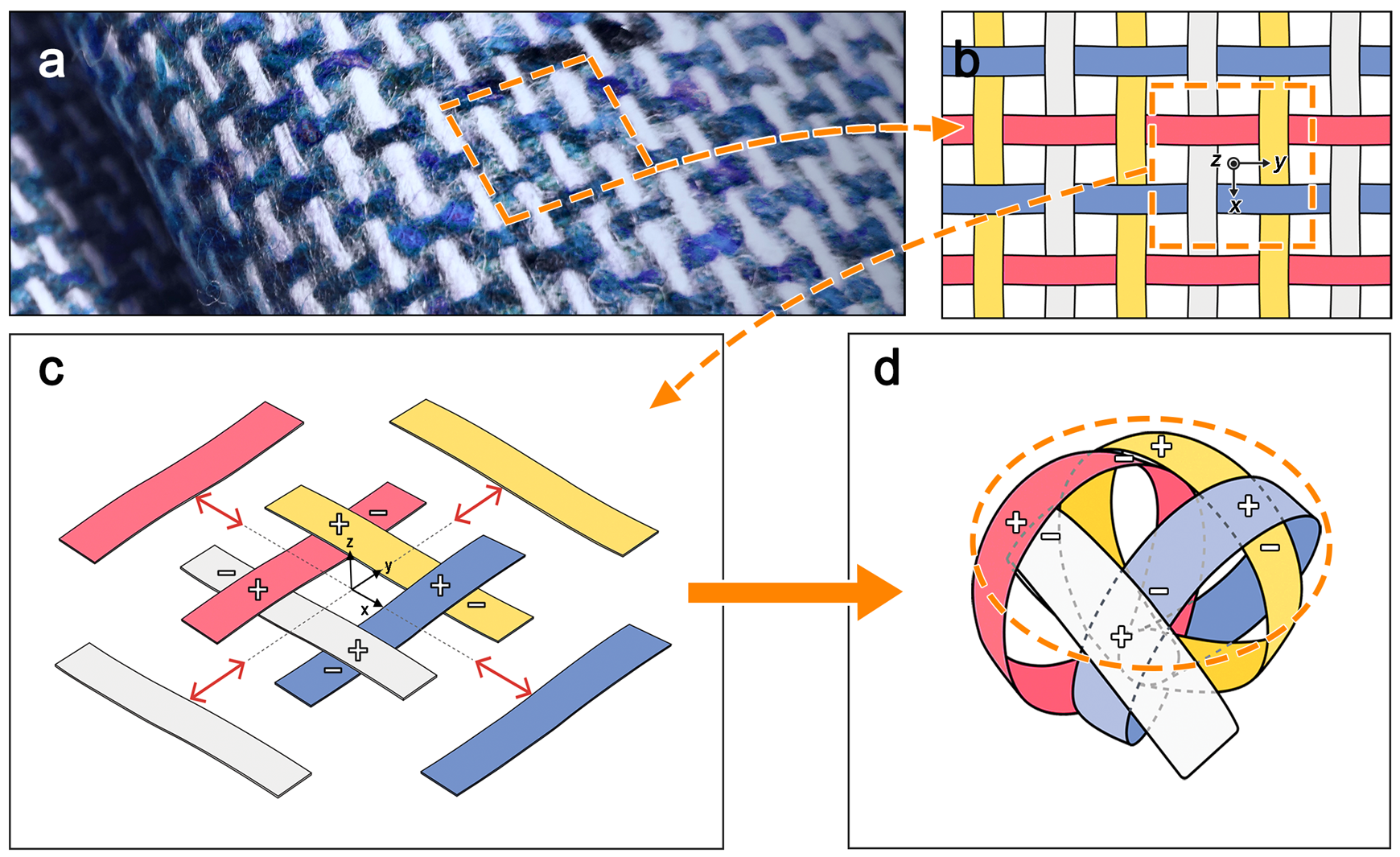
< [그림 1] 직조 구조 형성 원 >
다음 단계는 물건을 잡을 수 있는 그리퍼를 만들기 위하여 앞서 제시한 기하학적 원리를 만족하면서 직조 구조의 동적인 구성과 해체가 가능한 메커니즘을 설계하는 것이다. 이를 위해서는 서로 다른 끈이 각자의 위치 조건(ex 빨간 끈은 항상 흰색 끈 위에 있어야 하며, 흰색 끈은 항상 파란 끈 위에 있어야 하며… ) 을 항상 만족하면서도, 상대적인 거리를 바꿀 수 있어야 한다. [그림 2]는 이러한 조건이 어떻게 구조적으로 달성되었는가에 대해서 보여준다. 모든 끈은 시작점과 끝점을 공유한다. 하지만 끝점의 z 축 위치는 시작점보다 높으며, 각 끈은 위상차이를 가지고 배치된다. 따라서 위상이 앞서 있는 끈은 위상이 뒤처진 끈과의 교차점에서 반드시 높은 위치를 가져갈 수 밖에 없다. 이를 회전형으로 배치하여 항상 이러한 조건이 만족하도록 하면, 항상 직조 구조의 꼬인 배치를 달성할 수 있다 [그림 2].
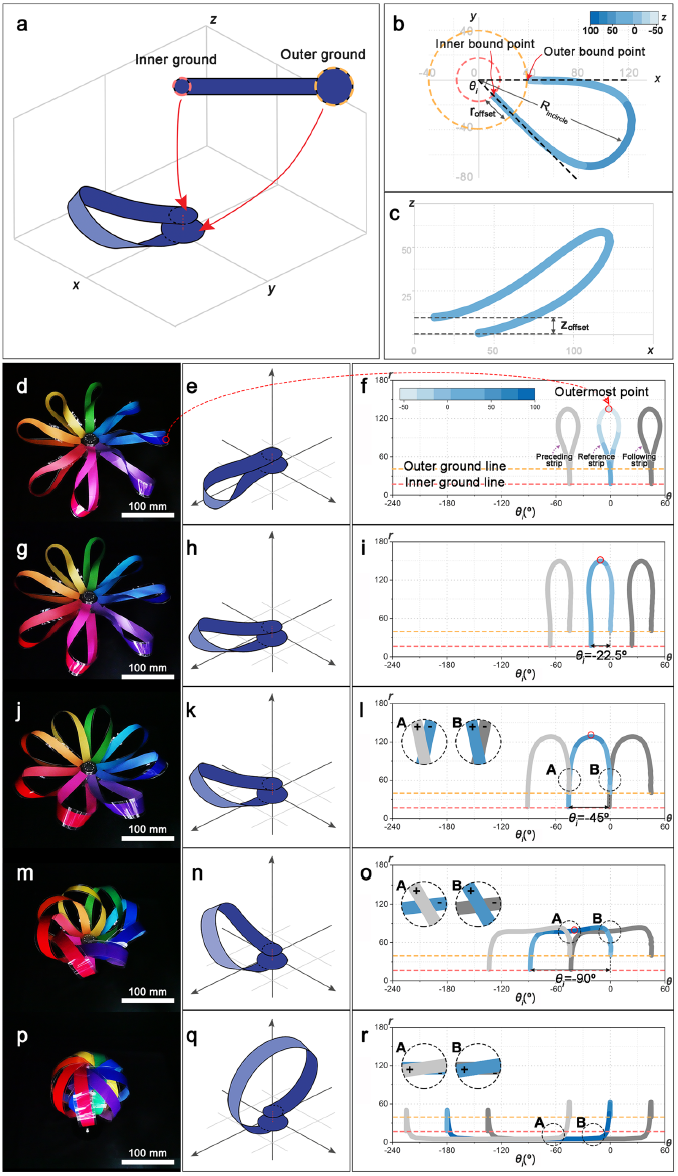
< [그림 2] 직조 구조 구성 원리를 재구성한 나선 직조 그리퍼 설 >
나선 직조 그리퍼의 핵심 특징이자 가장 큰 장점은 고하중 물체를 구속할 수 있다는 것이다. 일반적인 그리퍼의 경우 마찰력의 부족, 혹은 모터의 토크 부족에 의해서 물체를 놓치는 경우가 많다. 하지만 나선 직조 그리퍼는 물체를 완전히 감싸는 형태로, 재료가 파손되기 전까지는 물체를 안정적으로 구속할 수 있어 다른 형태의 그리퍼보다 극적으로 높은 내하중을 가지는 것이 가능하다. 성능 분석을 위하여 끈의 개수와 물체의 크기 변화에 따른 성능 실험을 진행하였다 [그림 3]. 본 실험을 통해 물체의 크기가 일정 크기 이하라면 완전한 구속이 되어 100 kg.f 이상의 하중을 견딜 수 있음을 보였으며, 크기가 클 경우 끈의 개수와 입력 토크에 따라서 영향을 받을 수 있음을 확인하였다. 나선 직조 그리퍼는 선행 개발된 그리퍼 대비 무게, 내하중 모든 측면에서 우월한 성능을 보여주었다 [그림 4].
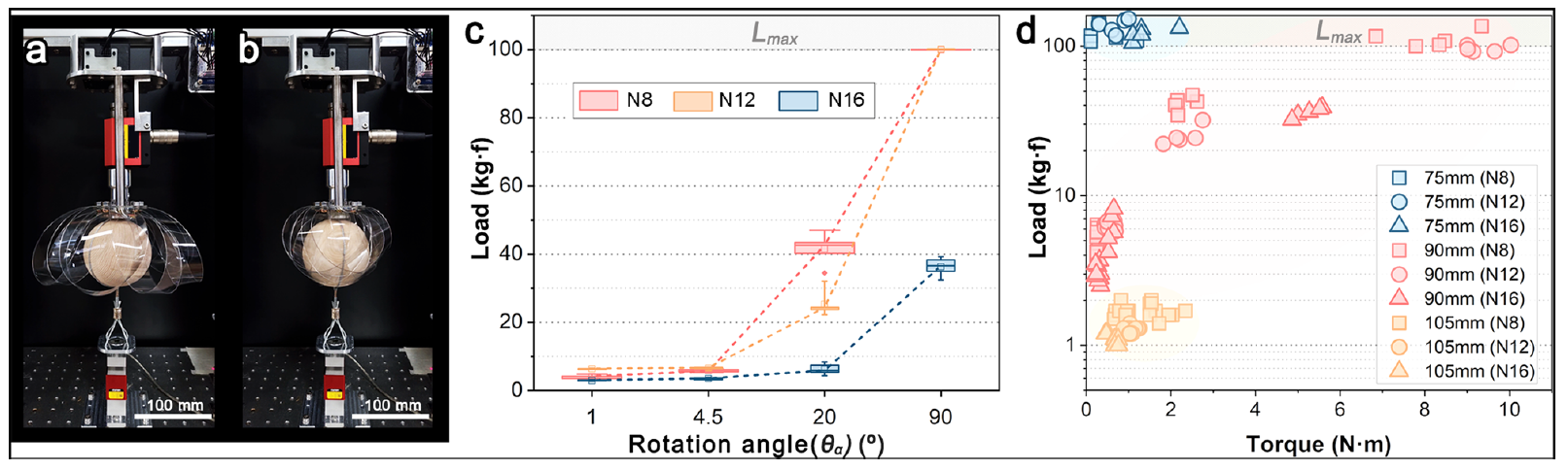
< [그림 3] 나선 직조 그리퍼 하중 성능 평가 >
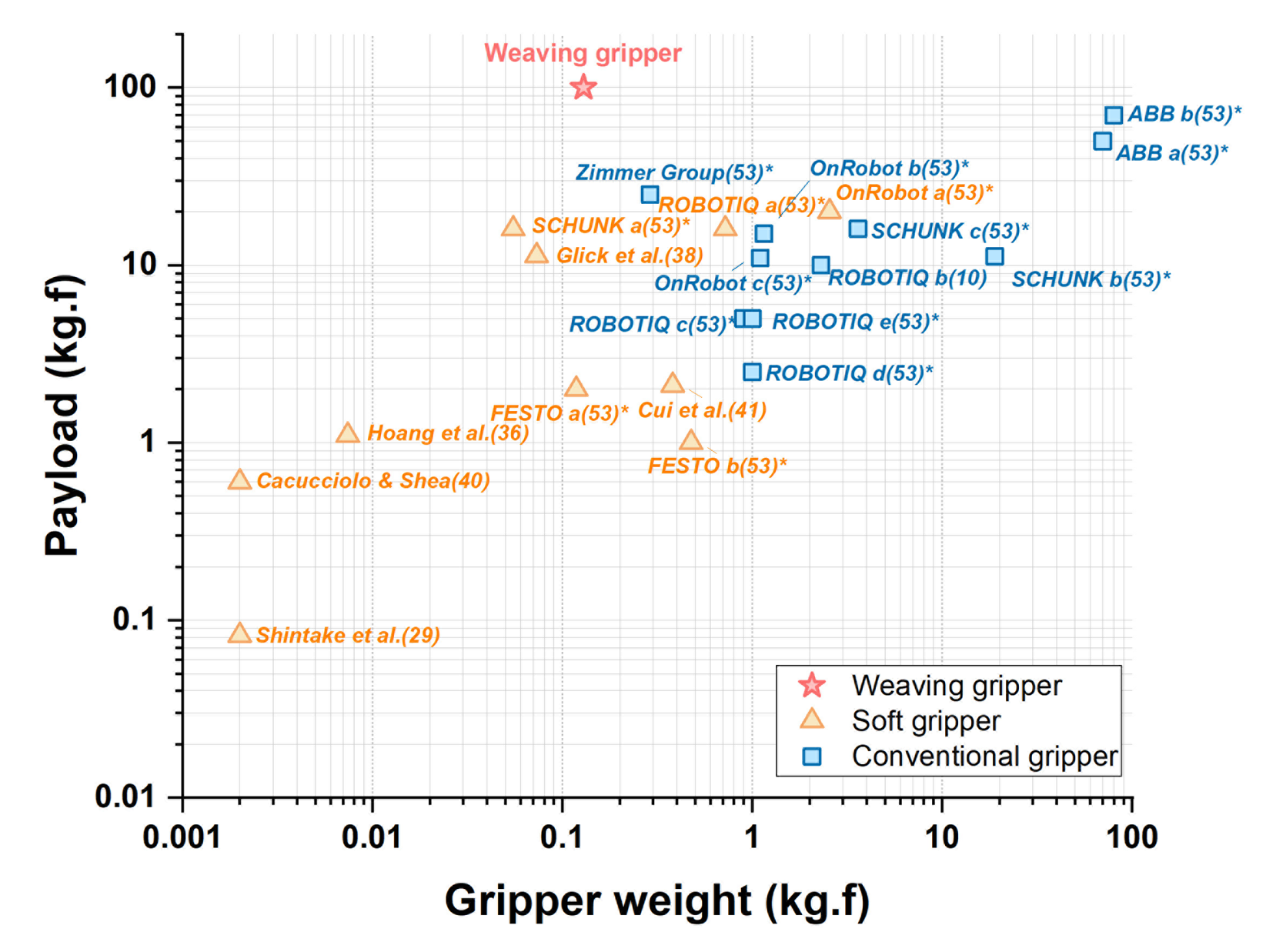
< [그림 4] 기존 그리퍼와의 성능 비교 >
나선 직조 그리퍼의 흥미로운 특징 중 하나는 재료의 유연성에서 오는 적응성이다. 쉽게 말해, 해당 그리퍼는 유연한 필름으로 만들어져 있어서 별도의 센싱이나 구동 없이 물체 형상에 맞춰 모양이 변화한다. 따라서 효율적으로 힘을 분포시키고 대상의 손상을 막는 것이 가능하다. [그림 5]은 이와 같은 특성에 대한 분석을 보여주고 있다. 한 끝단을 회전시킴에 따라 그리퍼는 서서히 모여들기 시작한다. 하지만 물체와 닿게 되면 그때부터 다른 모드의 변형이 일어나기 시작한다. 이를 통해 크기가 커서 잡을 수 없었던 물체를 완전하게 잡을 수도 있으며, 그것이 불가능할 경우 일정한 힘 이하로 물체에 고르게 힘을 분포시켜 물체에 가해지는 힘을 조절할 수 있다. 이러한 특징을 기반으로 다양한 물체를 구속할 수 있음을 시연하였다 [그림 6].
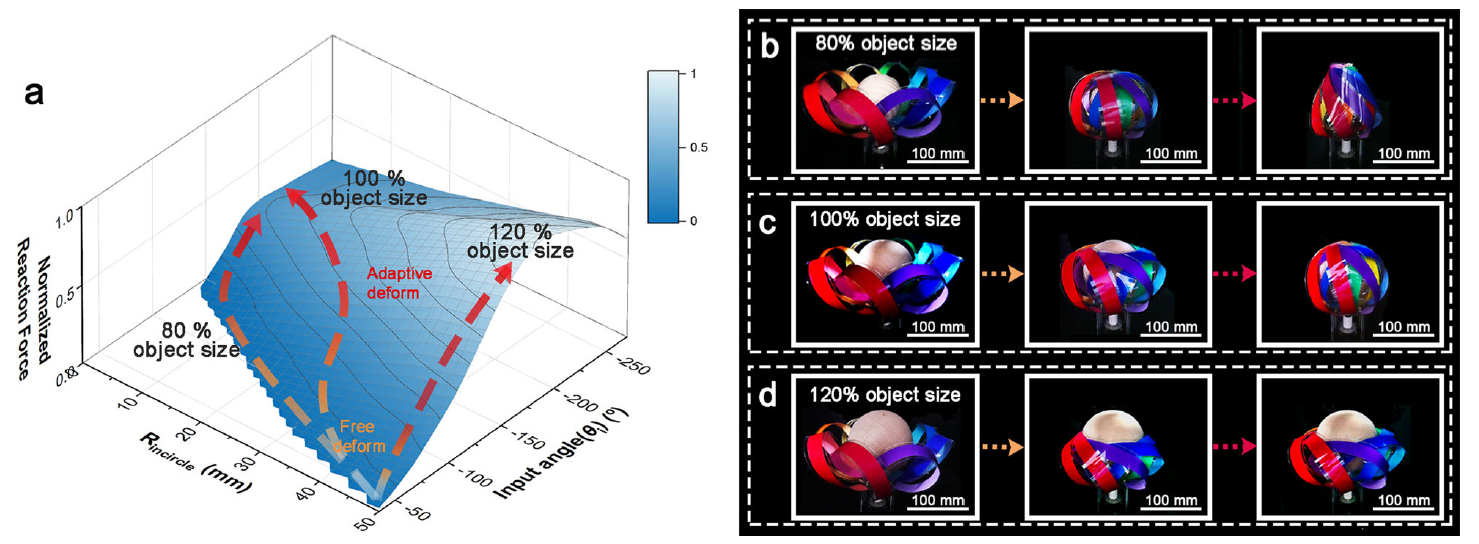
< [그림 5] 나선 직조 그리퍼의 적응성 >
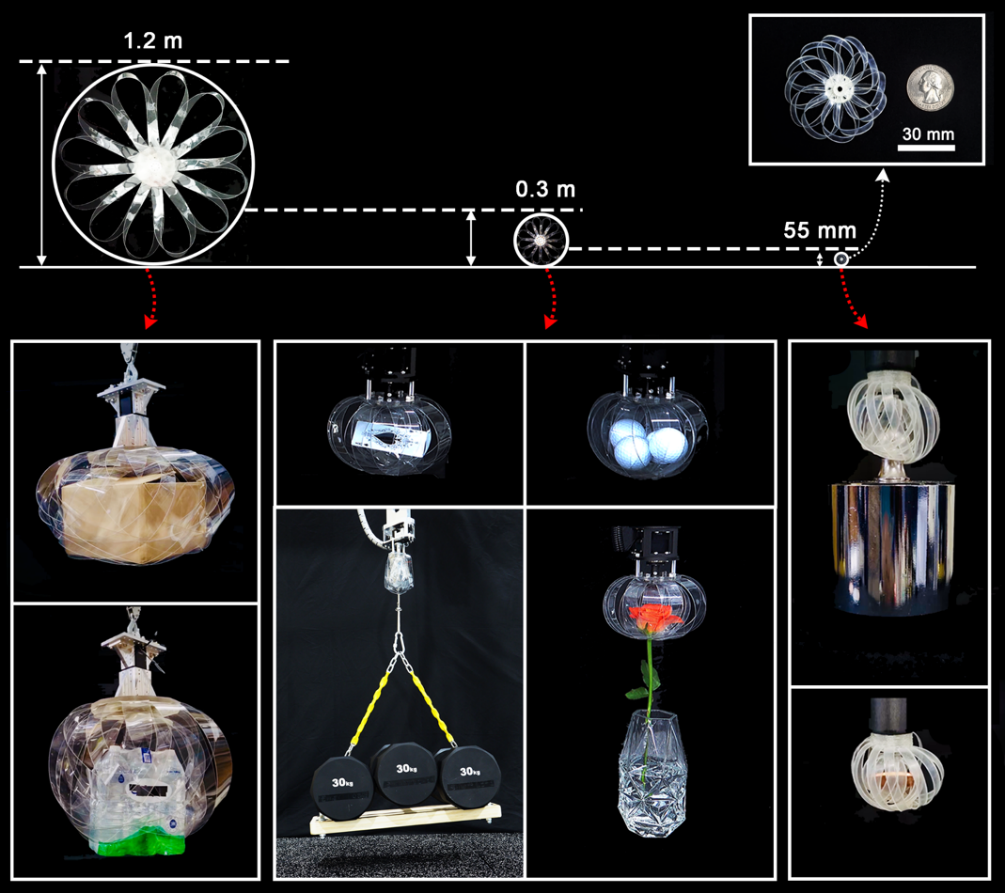
< [그림 6] 다양한 크기의 그리퍼와 이를 이용한 다양한 물체의 포획 시연 >
본 그리퍼는 기존 기술 대비 월등한 무게 부피 효율, 내구성, 신뢰성, 경제성을 보여줄 수 있을 것으로 기대되며, 기존 로봇 그리퍼가 극복하지 못하던 장벽을 허물고 다양한 항공우주 분야에서 활용될 수 있을 것으로 기대된다. 특히 무게 제한이 극심하면서도 외란이 강한 드론 택배, 섬세하면서도 강한 구속이 필요한 우주 잔해물 포획 등의 분야에서 높은 활용성을 보여줄 수 있을 것으로 기대다. 더 나아가 외부 오염이 극심하면서도 섬세한 작업이 필요한 농작물 수확, 다양한 형상의 물체의 대량 이동이 필요한 물류, 고하중 물체를 다루는 제조업 등에서 기존 그리퍼와는 차별화되는 높은 성능을 보여줄 수 있을 것으로 기대한다.
![]()
원문 이대영 교수[ae_dylee@kaist.ac.kr]
편집 이승찬[aero_sc@kaist.ac.kr]
Comment 0
- Total
- 56호
- 55호
- 54호
- 53호
- 52호
- 51호
- 50호
- 49호
- 48호
- 47호
- 46호
- 45호
- 44호
- 43호
- 42호
- 41호
- 40호
- 39호
- 38호
- 37호
- 36호
- 35호
- 34호
- 33호
- 32호
- 31호
- 30호
- 29호
- 28호
- 27호
- 26호
- 25호
- 24호
- 23호
- 22호
- 21호
| No. | Subject |
|---|---|
| Notice | 자유기고 모집 |
| Notice | Fund Raising |
| 344 |
항공우주공학과 News
|
| 343 |
신규 사업 소개 (복합 화학반응을 포함한 극초음속 다원자 혼합물 유동의 입자기반 해석기법 개발)
|
| 342 |
연구실 탐방 (전기추진 및 이온빔 응용 연구실 연구실)
|
| 341 |
연구실 탐방 (Space Testing And Research 연구실)
|
| 340 |
학부생 소식 (2025 봄 해피아워 개최)
|
| 339 |
특집 인터뷰 (이동호 교수)
|
| 338 |
동문 인터뷰 (Caltech 연구원 서종은 박사)
|
| 337 |
Research Highlight (이상봉 교수)
|
| 336 |
항공우주 이야기 (민간 무인 탐사선 블루 고스트 달 착륙)
|
| 335 |
Photo Album
|
| 334 |
항공우주공학과 News
|
| 333 |
연구실 탐방 (익스트림역학 및 멀티피직스 연구실)
|