
연구실 탐방 (항공우주 로보틱스 & 메커니즘 연구실. 지도교수 : 이대영)
항공우주 로보틱스 및 메커니즘 연구실 (Aerospace Robotics and Mechanisms Lab., ARML)은 항공우주 어플리케이션을 위한 로봇 및 기계 메커니즘 설계를 주 연구 테마로 합니다.
Keywords: Transformable robotics, Deployable structure, Origami engineering, Soft robotics, Active material
ARML은 항공 우주 미션을 위한 다양한 가변형 로봇 시스템을 설계하고 제작하는 것을 목표로 연구를 진행하고 있습니다. 접을 수 있는 달탐사 로버, 우주 쓰레기 수거를 위한 대형 그리퍼, 인공위성을 위한 전개형 우주 쓰레기 보호막, 스스로 조립되는 우주 거주지 등 여러 가지 재미있는 주제들이 있을 것으로 보고 있습니다. 다양한 우주 미션들을 같이 상상해보고, 문제 해결을 위한 창의적인 방법에 대해서 고민하고 또 직접 구현해 보는 것이 이 연구실에서의 주 연구 활동이 될 것입니다.
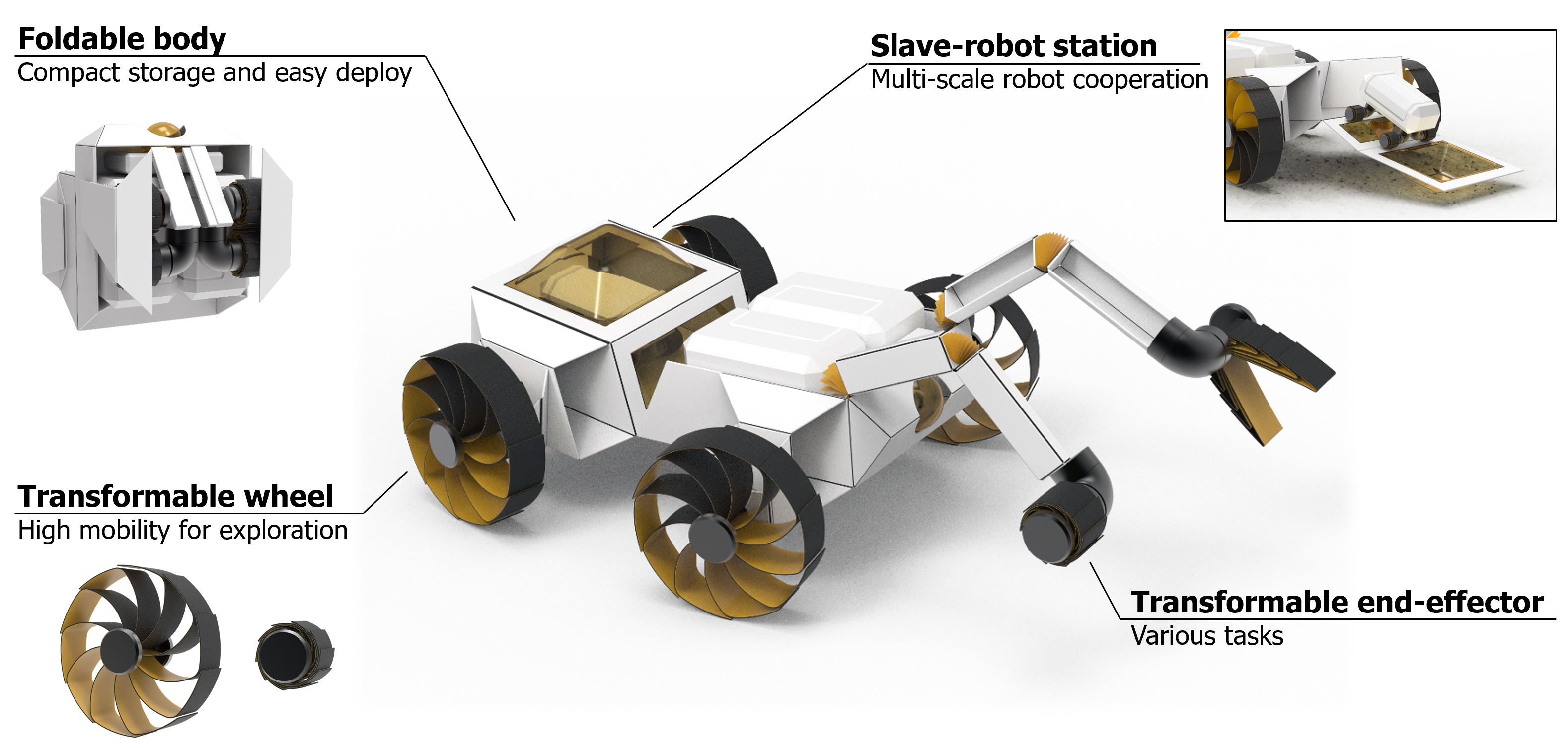
그림 1 : Foldable Rover Concept
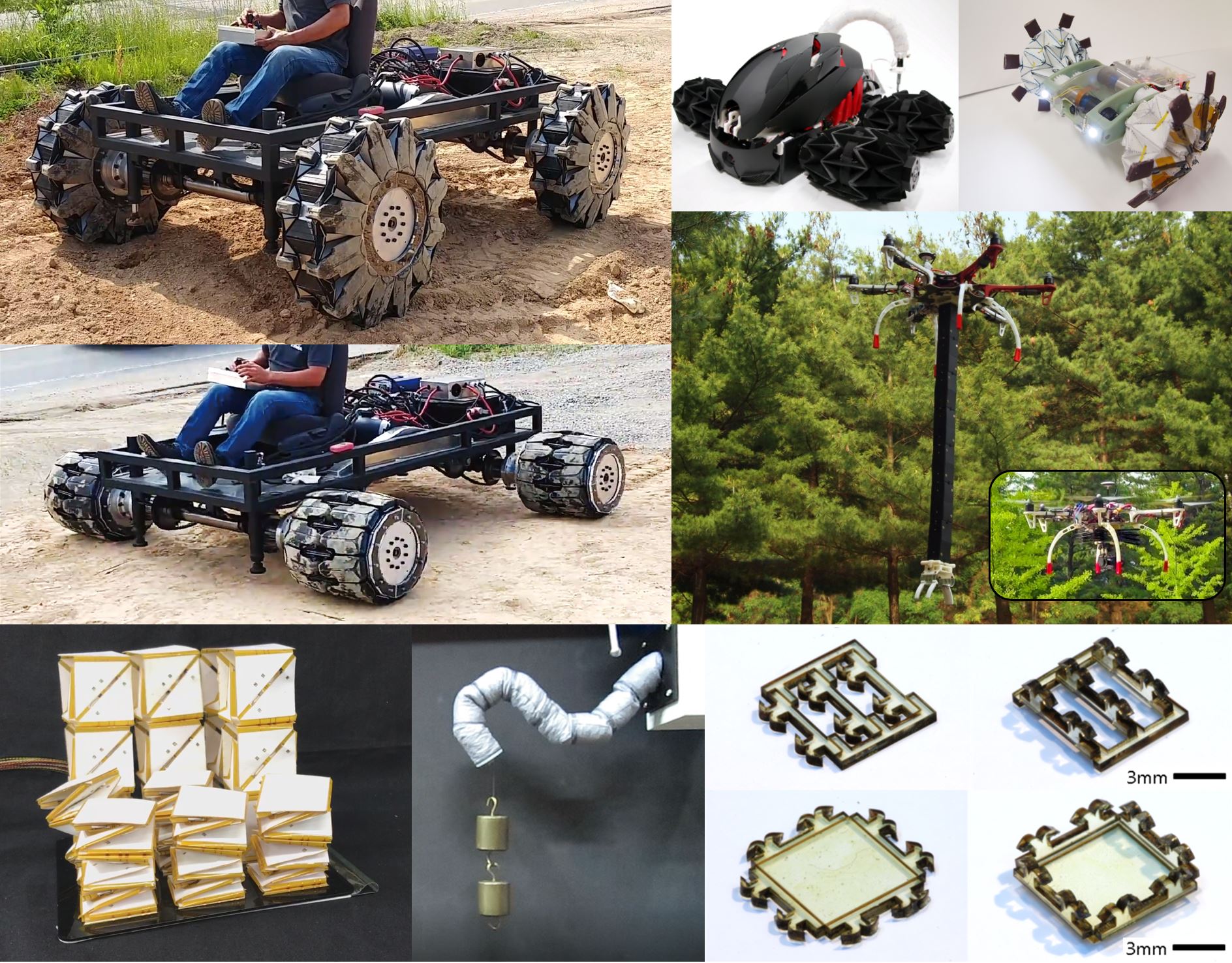
그림 2 : 종이접기, 소프트 로보틱스 설계 기술 등을 활용한 다양한 가변형 로봇 시스템
종이접기 응용 설계는 ARML의 주력 분야 중 하나입니다. 메커니즘 설계와 종이접기가 다소 어색한 조합처럼 보일 수도 있지만, 우산이나 접이식 가구와 같은 간단한 것에서부터 인공위성의 태양광 패널이나 우주 돛, 안테나와 같은 우주 구조까지 사실 이미 많은 곳에서 활용하고 있는 설계 기술입니다. 여기에 더불어 전통적인 메커니즘 설계 방법에서부터 생체모사 로봇이나 소프트 로보틱스와 같은 최신 기술까지 다양한 메커니즘 설계 방법에 대해 공부하게 될 것입니다. 또한 3D 프린팅, 레이저 가공 등 생각하는 것을 실제로 구현하기 위한 다양한 제조 방법에 대해서 공부하게 될 것입니다. 추가적으로 우주 환경에서 활용할 수 있는 소재나 외부 자극에 스스로 움직이는 능동 소재 등 다양한 특수 소재에 대한 지식도 공부하게 될 것입니다.
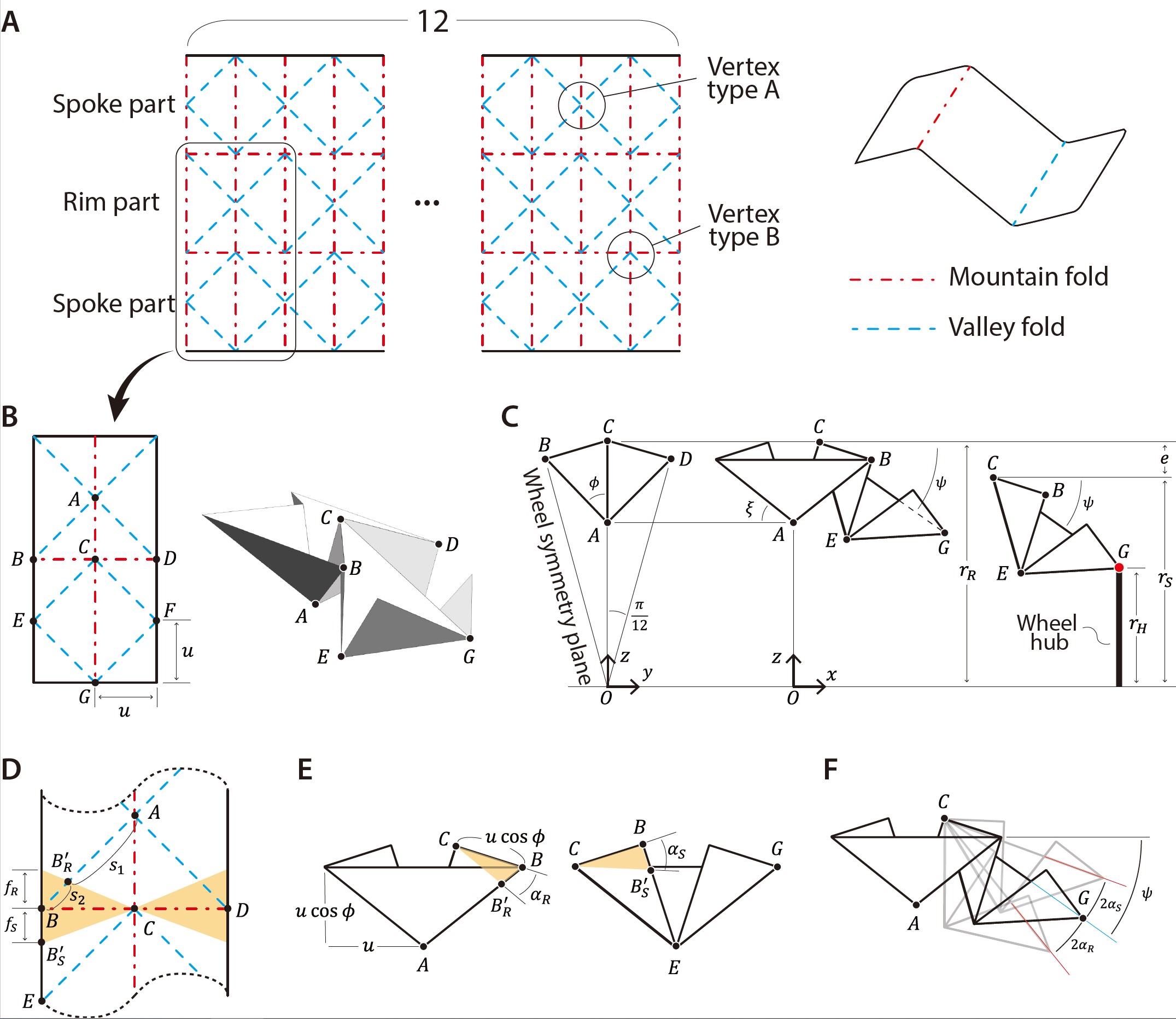
그림 3 : 종이접기 응용 메커니즘 설계
ARML의 연구 분야는 발명가가 하는 일과도 닮아 있습니다. 우리가 만들고자 하는 궁극적인 연구실은 자유롭게 상상할 수 있고 무엇이든 만들어 볼 수 있는 곳입니다. 새로운 것을 상상하고 직접 만들어 보는 것을 좋아하는 학생이라면 누구나 함께 즐겁게 연구할 수 있을 것입니다.
![]()
작성 이대영 교수님[ae_dylee@kaist.ac.kr]
편집 진도현[jdohyun7@kaist.ac.kr]
Comment 0
- Total
- 56호
- 55호
- 54호
- 53호
- 52호
- 51호
- 50호
- 49호
- 48호
- 47호
- 46호
- 45호
- 44호
- 43호
- 42호
- 41호
- 40호
- 39호
- 38호
- 37호
- 36호
- 35호
- 34호
- 33호
- 32호
- 31호
- 30호
- 29호
- 28호
- 27호
- 26호
- 25호
- 24호
- 23호
- 22호
- 21호
| No. | Subject |
|---|---|
| Notice | 자유기고 모집 |
| Notice | Fund Raising |
| 11 |
Photo Album
|
| 10 |
항공우주공학과의 최신 연구분야 (인공위성 상대 포즈 추정 연구)
|
| 9 |
항공우주공학과 News
|
| 8 |
항공우주 핫이슈 : 우주 시대 개막을 알리는 누리호 발사
|
| 7 |
특집 인터뷰 (KAIST 항공우주공학과 동문회장 성춘호 대표)
|
| 6 |
특집 인터뷰 (이전윤 교수)
|
| » |
연구실 탐방 (항공우주 로보틱스 & 메커니즘 연구실)
|
| 4 | 학부생 소식 |
| 3 |
신규 사업 소개 (우주분야 전문인력 양성사업 : 미래우주교육센터)
|
| 2 |
Fund Raising
|
| 1 |
자유기고 모집
|