
연구실 탐방
심현철 교수님의 무인 시스템 및 제어 연구실에 대하여 소개하겠습니다.
이번 연구실탐방에서는  심헌철 교수의 무인 시스템 및 제어 연구실(Unmanned System Research Group; USRG)에서 수행하는 연구를 소개합니다. 인간이 해왔던 일을 자율적이고 효율적으로 수행하기 위해 무인화 기술이 다양한 분야에서 활발하게 개발중이며, 무인 시스템 및 제어 연구실은 기존에 개발된 방법을 뛰어 넘어 창의적인 아이디어로 세계적인 연구 수행을 위해 다양한 노력을 기울이고 있습니다. 특히, 최근 이슈화 되고 있는 무인기와 드론에 대해 자체적인 비행제어 컴퓨터 개발, 충돌회피 기술, 그리고 센서 융합을 통한 실내 항법에 대한 연구를 수행 중입니다. 또한, 국제적인 무인항공기 실용화 흐름에 따라 이를 민간 공역 내에서 안전하고 효율적으로 통합, 운용하기 위한 연구, 차세대 첨단기술로 꼽히는 무인 전투기에 대한 지능형 제어 계(system)에 대한 연구도 수행 중입니다.
심헌철 교수의 무인 시스템 및 제어 연구실(Unmanned System Research Group; USRG)에서 수행하는 연구를 소개합니다. 인간이 해왔던 일을 자율적이고 효율적으로 수행하기 위해 무인화 기술이 다양한 분야에서 활발하게 개발중이며, 무인 시스템 및 제어 연구실은 기존에 개발된 방법을 뛰어 넘어 창의적인 아이디어로 세계적인 연구 수행을 위해 다양한 노력을 기울이고 있습니다. 특히, 최근 이슈화 되고 있는 무인기와 드론에 대해 자체적인 비행제어 컴퓨터 개발, 충돌회피 기술, 그리고 센서 융합을 통한 실내 항법에 대한 연구를 수행 중입니다. 또한, 국제적인 무인항공기 실용화 흐름에 따라 이를 민간 공역 내에서 안전하고 효율적으로 통합, 운용하기 위한 연구, 차세대 첨단기술로 꼽히는 무인 전투기에 대한 지능형 제어 계(system)에 대한 연구도 수행 중입니다.
무인항공기의 유도, 항법 및 제어 (Guidance, Navigation and Control of Unmanned Aerial Vehicle))
본 연구실에서는 최근 ‘드론’이라고도 불리는 무인항공기(Unmanned Aerial Vehicle)를 중심으로 고정익/회전익/멀티로터/신개념 비행체 등 다양하고 독특한 플랫폼 개발과 개발결과물의 동역학적 특성 분석 및 이를 바탕으로 실내/외 환경 하의 군용/민수용 임무를 보다 효과적이고 효율적으로 수행하기 위한 유도, 항법 및 제어시스템 설계에 관한 연구를 수행하고 있습니다.
특히, 플랫폼 제작부터 핵심 비행제어/임무수행 알고리듬 설계 및 구현까지 폭넓은 분야에 대하여 연구개발을 수행하고 있기 때문에 관련분야의 국책 및 산학 과제를 다수 수주하여 성공적으로 수행 중이며 최근 사회적으로 이슈가 되고 있는 ‘무인항공기 충돌회피 기술’, ‘비인가 무인항공기 탐지 및 대응기술’, ‘유인시스템의 무인화 기술’, ‘무인이동체 융합기반 운송기술’ 등의 기술요구에 부합하는 연구 개발 결과를 산출하여 국가 항공우주산업에 한 축을 담당하고 있습니다.
이러한 기술 수요를 만족시키기 위해서는 세 가지 핵심기술이 비행 제어 컴퓨터를 통해 구현되어야 합니다. 먼저, 임무환경에 적합한 센서를 활용하여 무인항공기의 비행상태변수와 임무환경변수를 추정하는 항법기술이 필요합니다. 또한 항법기술의 결과물을 바탕으로 임무성격에 맞는 유도명령을 산출하는 유도기술이 필요하고 이것을 활용하여 무인항공기의 안정적인 자세제어를 위한 제어기술이 필요합니다. 본 연구실에서는 영상 및 라이다(LiDAR)센서를 이용하여 주변환경을 탐지 또는 인식한 다음 주변환경과의 상대운동정보를 추정하는 항법기술과 GPS와 관성센서를 융합한 절대운동정보를 추정하는 항법기술을 자체 개발하여 보유하고 있습니다. 또한 이 기술의 산출물을 통해 주어진 임무를 수행하기 위한 자동 기준궤적과 상대속도 프로파일 계산, 정밀 궤적추종을 위한 시선각 기반 유도기술을 구현하였고 비행조건 변화에 따른 제어성능 변화를 최소화하기 위해 적응제어 기법을 적용하여 사람에 의한 별도의 조작이 필요 없는 제어기술을 자체 개발하여 실제 비행실험이 수반된 다수 연구과제수행을 통해 안정화하였습니다. 최근에는 Nvidia TK1 혹은 Odroid XU4와 같이 소형/경량화된 강력한 임베디드 컴퓨터와 본 연구실이 개발한 비행제어시스템이 결합하여 다수 센서 동기화, 학습기반 주변환경 탐지 및 인식 등 센서융합운용 관련 기술뿐만 아니라 다수 무인항공기 운용을 위한 임무수행 제어 등의 고차원적인 알고리듬 개발도 수행하고 있습니다.
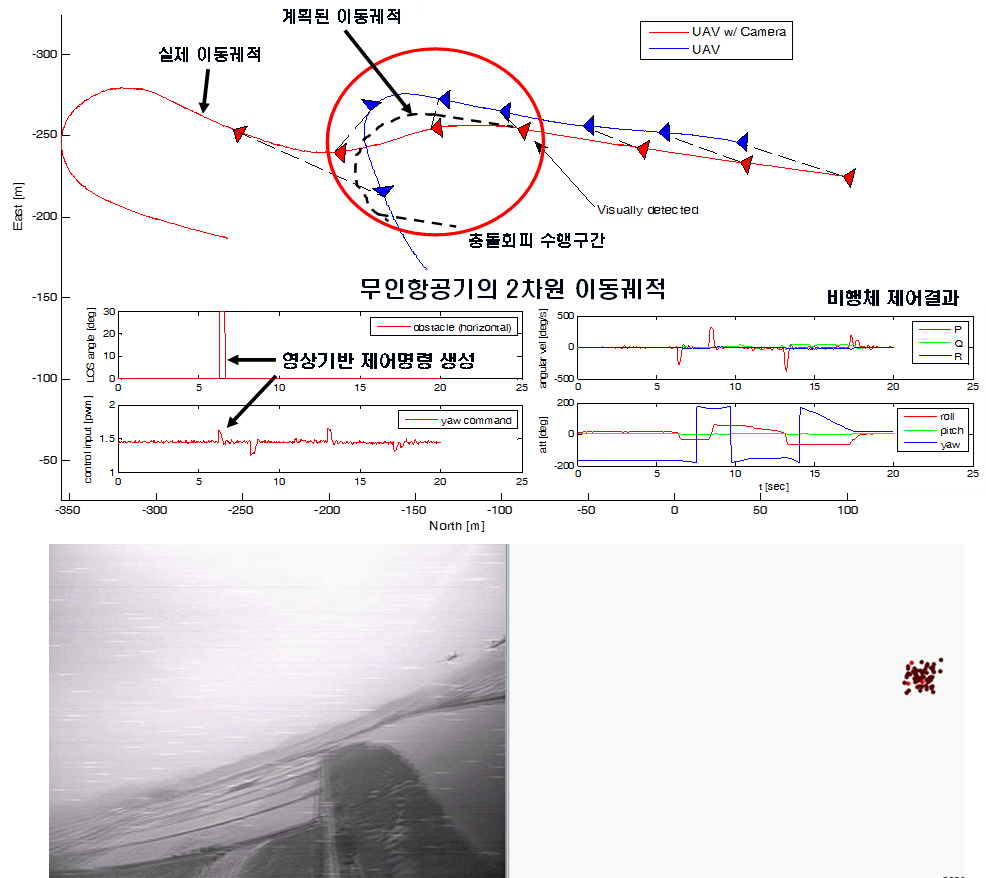
[그림 1] 고정익 무인항공기의 영상기반 충돌회피 기술연구 (상단: 충돌회피 임무수행 중 획득한 시간에 따른 비행상태변수, 하단: 충돌위험 항공기 검출 및 추적을 위한 영상처리 알고리듬 수행 결과)
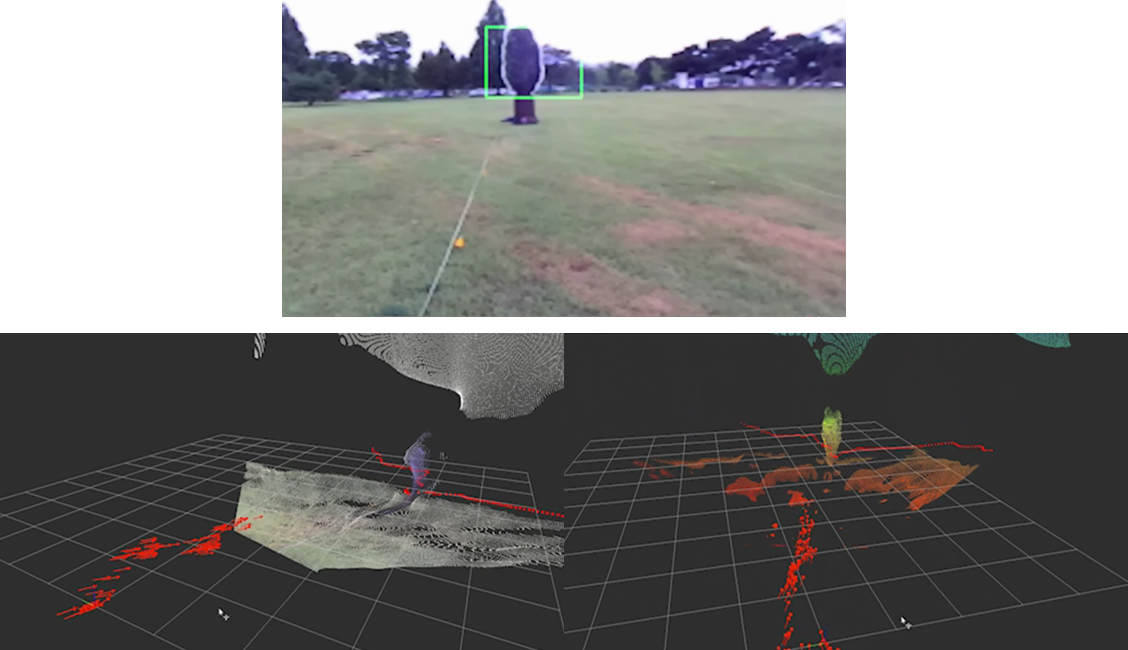
[그림 2] 회전익 무인항공기의 저고도/비정형 장애물 검출 및 추적 비행실험

[그림 3] 비인가 무인항공기 탐지 및 포획기술 비행실험
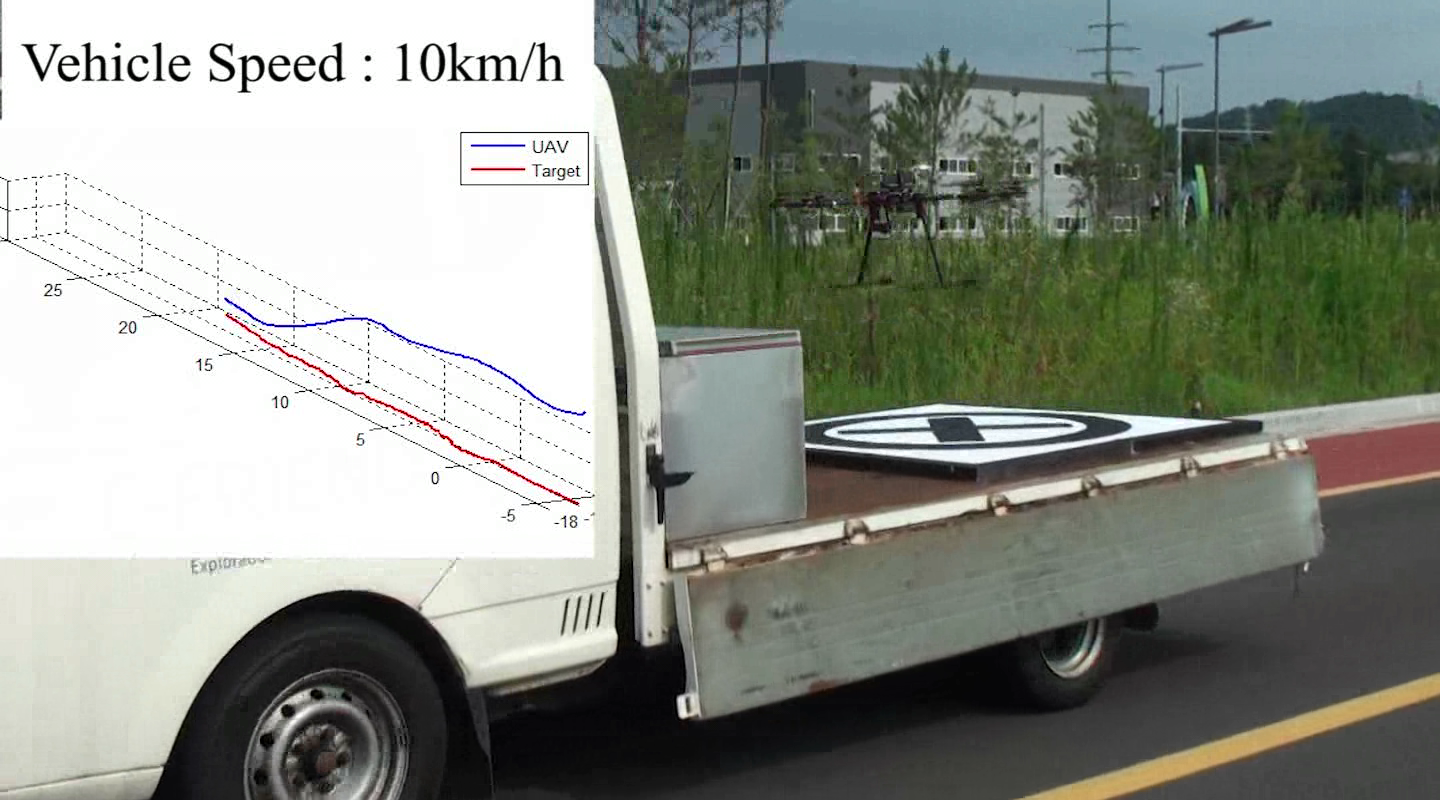
[그림 4] 회전익 무인항공기의 영상기반 이동형 플랫폼 자동착륙

[그림 5] 다수 무인항공기 운용

[그림 6] 비행 머니퓰레이션을 활용한 물체 이송실험
무인항공기 안전운항기술 개발 및 통합 시범운용(Flight Safety Regulation Development and Integrated Operation Demonstration for Civil RPAS))
전 세계적으로 무인항공기를 민간공역 내에서 안전하고 효율적으로 통합, 운용하기 위한 노력들이 진행 중인데, 본 연구실에서는 민간 무인항공기의 시험 운용 인프라를 구축하고 이를 이용한 무인 항공기의 각종 시험비행을 통한 운용자료를 축적하며 운용 기술기준, 인증기반, 운용절차를 수립하고자 합니다. 이를 통해 곧 다가올 민간 무인항공기 시대를 준비하고 국내운용경험을 기반으로 현재 국제민간항공기구(ICAO)를 중심으로 추진 중인 민간 무인항공기 관련 기준 정비에 참여하고 이를 선도하고자 합니다.
본 연구를 통하여 민간 무인항공기 인증체계 및 운항기준의 수립을 통한 국내 무인항공기 운용기반을 확보하고 시험운용을 통해 민간무인항공기의 전국적 보급에 필요한 근거 데이터를 확보할 수 있으며, 연구결과를 기반으로 ICAO RPAS Panel에 참여하여, 국제 무인항공기 관련 법규 및 규정 수립과정에 적극적으로 기여 할 것으로 기대됩니다. 추후 활발하게 전개될 각종 민간주도 무인 항공기 사업 수행에 본 연구를 통해 도출된 운용기준, 인증방안, 운용 인프라를 활용 할 수 있고 장래 전국적인 무인 항공기 운용체계 구축 시 본 연구 결과를 확장하여 적용 가능할 것입니다.

[그림 7] 통신 중계기 활용 장거리 비행

[그림 8] 무인항공기 감시레이더 구축
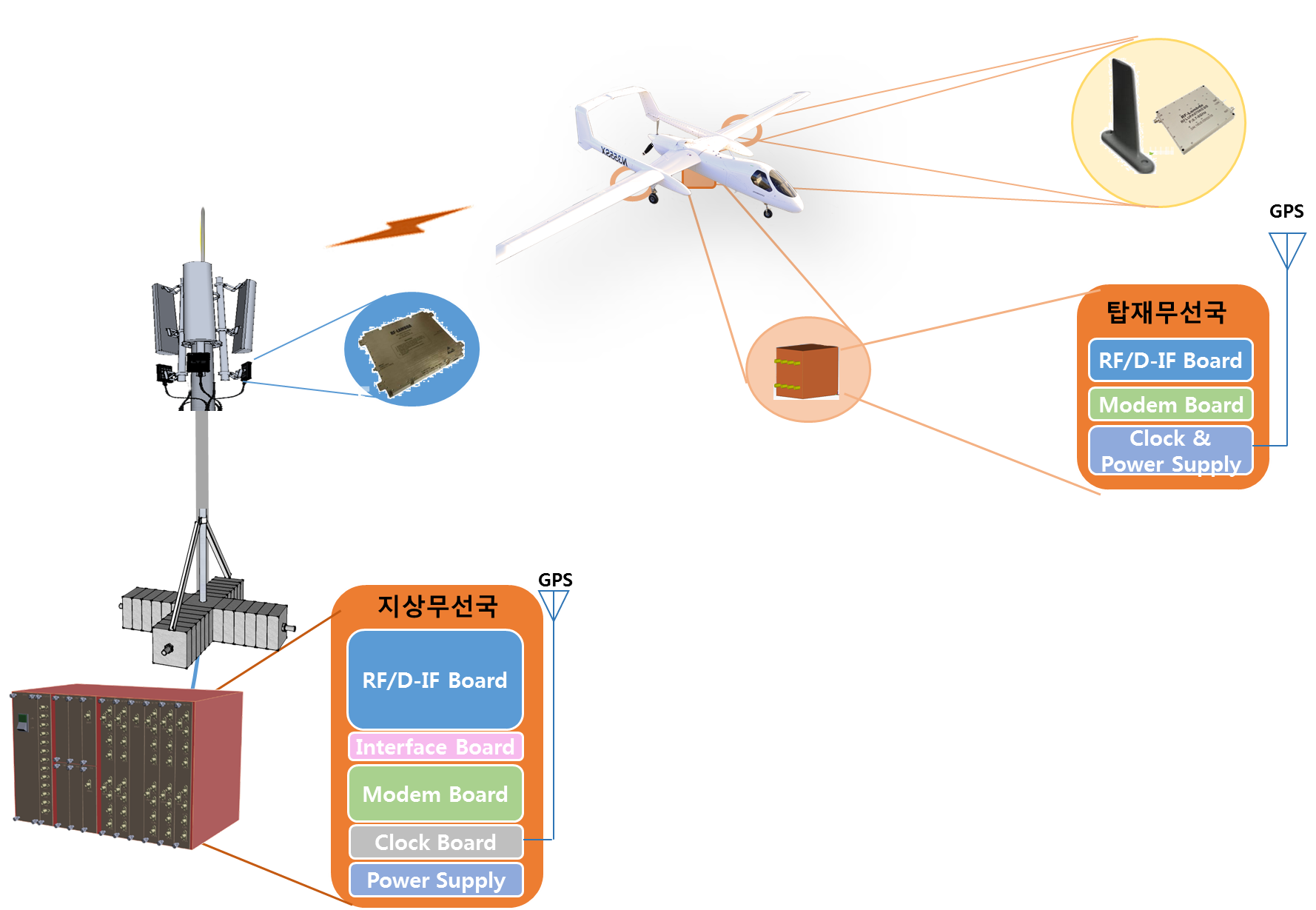
[그림 9] 무인기 CNPC 시범 인프라 구축
무미익 형상의 저피탐형 무인기에 대한 지능 기반 제어계 연구(Intelligence-based Control System for Tailless UAV) )
무인 전투기(Unmanned Combat Aerial Vehicle)는 공중 교전 상황에서 발생하는 생존의 위험성으로부터 유인 조종사를 안전하게 할 뿐만 아니라 피탐성, 센서, 기동성 등의 다양한 측면에서 현재의 유인 전투기를 능가할 것으로 기대되는 차세대 첨단 기술입니다. 본 연구 수행을 통해 미래 전투환경에서 핵심적인 역할을 수행할 무인전투기를 위한 핵심 원천 기술의 개발을 목표로 합니다. 무인전투기는 최소의 피탐성을 갖기 위해 특수한 날개 및 동체 형상이 요구되어 공력적으로 해석이 까다로운 불안정한 거동을 보입니다. 이같은 특성을 갖는 기체를 통제하면서 복잡한 공격임무를 수행하려면 새로운 개념의 지능형 비행제어장치, 임무설계 및 의사결정, 효과적인 지상체의 개발이 반드시 선행되어야 합니다. 이러한 배경에서 본 연구를 통해 최소의 피탐성을 갖는 무인전투기의 형상설계와 무인기의 임무수행능력 향상을 위한 지능형 유도제어 및 의사결정 알고리듬 설계 원천기술을 확보하는 것을 목표로 하며, 복잡한 다대다 공중 교전 상황에서의 효율적이고 자율적인 공중 교전 알고리듬의 개발을 수행 중입니다. 이를 통해 무인 전투기에 대한 미래 첨단 기술을 독자적으로 개발 보유하고 세계에서 선두적인 위치를 선점하기 위한 기반을 마련할 계획입니다.

[그림 10] 저피탐형 무인기의 지능 기반 제어계 연구의 목표 및 개념도
최소 침습성 무인화 기법 연구(Minimal Modified Automation Technology))
비행기나 자동차 등 이동체(vehicle)를 무인화 하는 방법으로서 휴머노이드(humanoid) 구조의 로봇 플랫폼을 사용하여 이동체에 별도의 개조 없이 단시간에 기존에 사람이 운용하던 이동체를 무인화 하는 기법을 연구, 개발하고 비행 모션을 모사하는 시뮬레이터에 적용 및 검증하는 연구를 수행 중입니다. ROBOTIS Dynamixel로 이루어진 6자유도의 양팔과 3자유도의 두 다리로 비행 모션을 모사하는 시뮬레이터에서 실제 비행체의 칵핏(Cockpit)을 모사한 조종간(yoke, rudder, throttle)을 조작하여 실시간 비행 시뮬레이션의 경비행기를 자율화해 조종이 가능하도록 합니다. 로봇은 자동 이륙부터 고도 상승, 순항, 고도 하강, 선회를 거쳐 자동 착륙까지 유인 조종사가 비행기 운항 과정에서 하게 되는 모든 조종과 조작들을 비행 시뮬레이션 시나리오 내에서 수행 가능하도록 개발되었습니다. RGB 단안 카메라를 부착하여 조종 패널을 인식하고, 비행 시뮬레이션 내의 발생할 수 있는 외부의 방해에도 능동적으로 대처 가능합니다. 본 연구를 통해 개발된 이동체 무인화 기술은 기존에 사용되는 이동체에 바로 적용될 수 있으며, 학습된 모든 이동체를 한 개의 로봇 플랫폼으로 조종할 수 있다는 장점이 있습니다. 원전 사고와 같은 응급 상황에 인간의 안전에 위협을 받는 지역에 투입하여 미션을 수행할 수 있다는 점에서도 연구의 가치를 찾을 수 있습니다.

[그림 11] 비행 모션 시뮬레이터

[그림 12] 최소 침습성 무인화
![]()
편집 박재윤[dezukaquni@kaist.ac.kr]
Comment 0
- Total
- 56호
- 55호
- 54호
- 53호
- 52호
- 51호
- 50호
- 49호
- 48호
- 47호
- 46호
- 45호
- 44호
- 43호
- 42호
- 41호
- 40호
- 39호
- 38호
- 37호
- 36호
- 35호
- 34호
- 33호
- 32호
- 31호
- 30호
- 29호
- 28호
- 27호
- 26호
- 25호
- 24호
- 23호
- 22호
- 21호
| No. | Subject |
|---|---|
| Notice | 자유기고 모집 |
| Notice | Fund Raising |
| 344 |
항공우주공학과 News
|
| 343 |
신규 사업 소개 (복합 화학반응을 포함한 극초음속 다원자 혼합물 유동의 입자기반 해석기법 개발)
|
| 342 |
연구실 탐방 (전기추진 및 이온빔 응용 연구실 연구실)
|
| 341 |
연구실 탐방 (Space Testing And Research 연구실)
|
| 340 |
학부생 소식 (2025 봄 해피아워 개최)
|
| 339 |
특집 인터뷰 (이동호 교수)
|
| 338 |
동문 인터뷰 (Caltech 연구원 서종은 박사)
|
| 337 |
Research Highlight (이상봉 교수)
|
| 336 |
항공우주 이야기 (민간 무인 탐사선 블루 고스트 달 착륙)
|
| 335 |
Photo Album
|
| 334 |
항공우주공학과 News
|
| 333 |
연구실 탐방 (익스트림역학 및 멀티피직스 연구실)
|