
연구실 탐방 (항공우주시스템 및 제어 연구실 / 지도교수 : 방효충)
항공우주시스템 및 제어 연구실(Aerospace Systems and Control Lab., ASCL, 지도교수 : 방효충)은 지난 20여년간 무인비행체 시스템과 우주비행체 시스템의 유도,제어,항법에 대한 다양한 연구와 국방기술 관련 핵심 기술 연구를 주로 수행하고 있는 국내의 대표적인 학계 연구실입니다.

ASCL에서는 무인비행체 시스템(고정익, 헬리콥터, 멀티로터형의 기체)를 모두 운용, 연구 및 실험을 하고 있으며, 우주비행체 시스템은 인공위성 자세제어, 임무설계, 심우주탐사등을 포함하고 있으며 큐브위성 제작 및 운용 경험을 토대로 연구와 지상시험을 수행하고 있습니다. 최근 항공우주시스템 분야에 인공지능(AI) 기술을 접목하기 위한 응용 연구도 함께 진행하고 있습니다. 다양한 항공우주시스템의 문제를 정의하고 문제해결 방법을 직접 구현함으로써 실제 현장감 있는 연구 경험을 쌓을 수 있는 전통과 연구 환경이 마련되어 있습니다.

1. 우주비행체 유도·항법 및 제어(GNC) 연구
우주비행체(Spacecraft) 최적 궤도 결정, 궤도 수정, 목표물에 대한 랑데부, 자세 결정 및 제어 등 우주 비행체의 궤도 역학과 동역학을 바탕으로 다양한 연구를 지난 20여년간 수행하고 있습니다. 달 및 화성표면 연착륙을 위한 유도제어 기법에 대한 연구를 수행하여 관련 시뮬레이터 구현연구를 수행하였습니다.

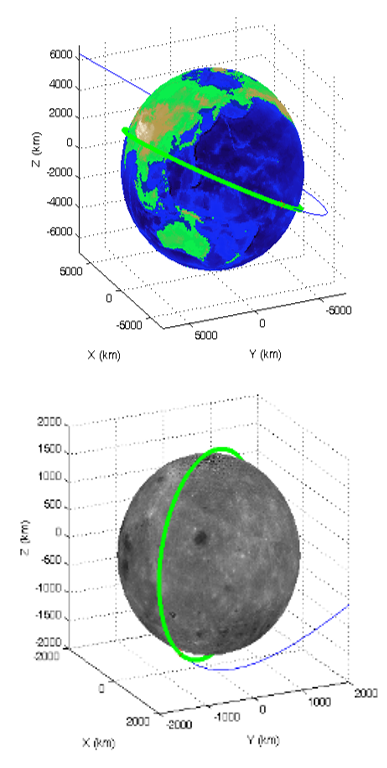
< (왼쪽부터) 인공위성 1축 자세 제어 시뮬레이터, 연료 최소화 달착륙궤도 설계 >
2. 인공위성 시스템 개발
인공위성의 서브시스템인 자세제어부, 전력부, 통신부, 지상국 등 지구 관측 임무를 수행하는 시스템 전반에 대한 연구 개발을 진행하고 있습니다. 실제 설계 및 제작을 목표로 하고 있습니다. 지금까지 3차례의 큐브위성 우주발사 임무를 수행하였습니다. 인공위성의 신속(Agile) 자세 기동을 위한 자세명령생성 기법과 대용량 구동기인 CMG(Control Moment Gyro) 연구를 수행하고 있습니다. 또한 큐브위성등 초소형 위성에 탑재되는 자세제어 시스템(ADCS)을 독자적으로 설계하고 개발하는 연구를 수행 중에 있습니다.
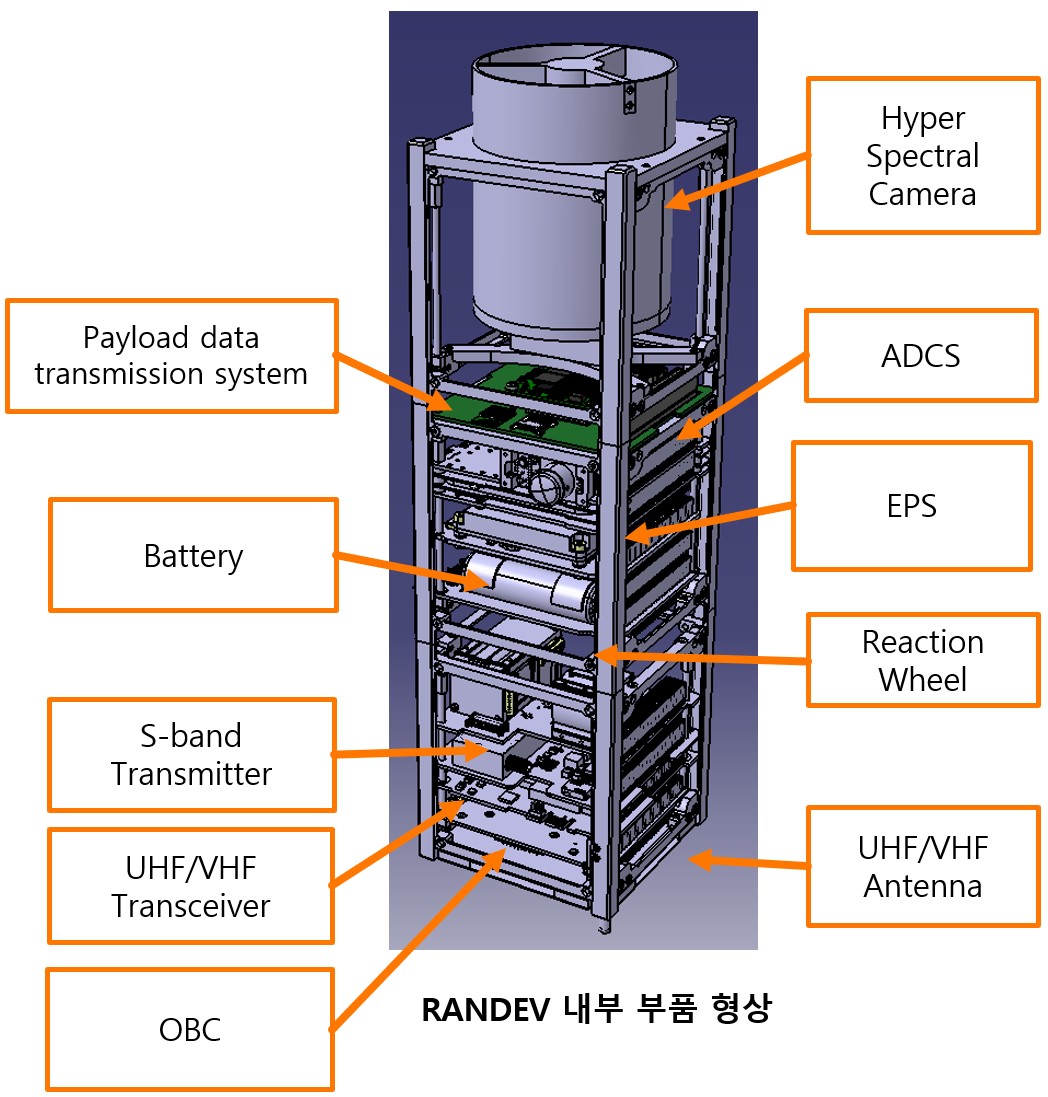

< (왼쪽부터) RANDEV 큐브위성(2022), LINK 큐브위성(2017) >
3. 기타 우주 시스템 개발
정부의 스페이스 챌린지 사업을 통해 우주쓰레기 제거 임무를 위한 유도제어 기법을 연구하고 있으며 지상 시험 장치를 구현하고 있습니다. 다양한 우주 임무 수행을 위한 탑재체(Payload) 개발에 착수하고 있으며 초분광 카메라등 광학 탑재체와 RF 방식의 탑재체를 함께 연구하고 있습니다. 또한 달표면 및 화성탐사용 로버의 항법과 자율 운용 및 신뢰성 확보를 위한 오류에 강건한 시스템 구현 연구를 수행 중에 있습니다.
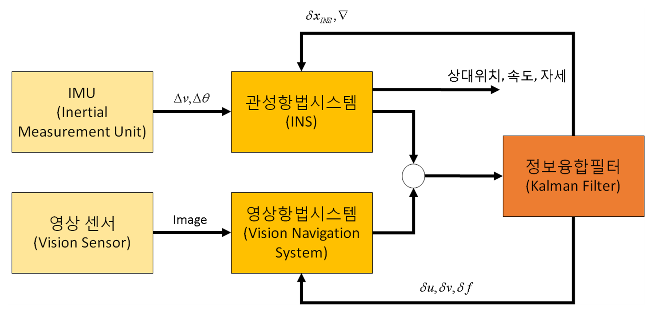
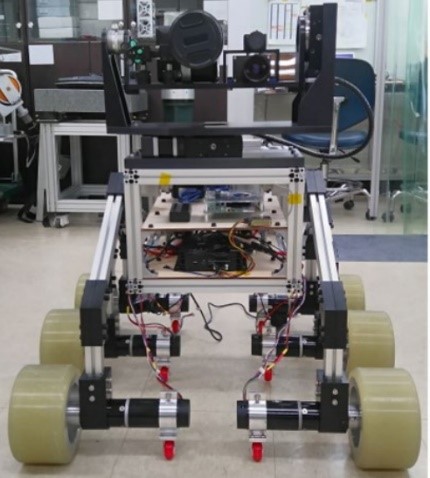
< (왼쪽부터) 듀얼 쿼터니언 기반 상대자세 추정, 달 탐사용 로버 >
4. 무인기 유도/항법 및 제어(GNC) 연구
다양한 무인비행체 시스템 플랫폼 설계 및 제작을 수행하고 있으며 핵심 유도, 항법, 제어 알고리즘을 SW로 구현하고 나아가 실제 비행실험을 통해 검증하는 대표적인 시스템 중심의 연구를 수행하고 있습니다. 비행제어의 고신뢰성 확보를 위한 3중 다중화 비행제어 컴퓨터 시스템을 연구하고 센서 및 구동장치 다중화로 연결시키고 있습니다. 비행제어 및 항법용 컴퓨터를 최적화하여 경량 소형화하고 내장 S/W를 자체적으로 구현하여 독자 기술을 확보하고 있습니다. 국방 분야의 연구로 확장하면 장거리 유도형 탄약의 유도항법 및 제어 알고리듬을 개발하였으며 미사일 방어체계를 위한 상단 제어를 위한 고체 추진체의 제어 원천 기술을 확보하고 있습니다. 그리고 1인승 탑승이 가능한 유무인 복합 호버바이크(Hoverbike) 비행체 연구개발을 2019년에 착수하여 진행하고 있습니다. 또한 지형 및 영상 기반의 대조항법을 국내에서 선도적으로 수행하고 있고 드론의 영상 정보를 이용한 상황 인식 및 목표물 추적 등 응용 연구를 함께 수행하고 있습니다. 대부분의 기술은 H/W 혹은 S/W로 구현되어 향후 실제 적용 가능성을 목표로 하고 있습니다. 전투기의 저고도 침투를 위한 ATF(Automatic Terrain Following)을 위한 핵심 기술을 자체적으로 개발하여 현재 국산화 사업에 참여하고 있습니다.


< (왼쪽부터) Parafoil UAV(1,2), Tiltrotor UAV >


< (왼쪽부터) Hexacopter, Quadcopter >

< 비행체 시스템 개발 및 통합 과정 >
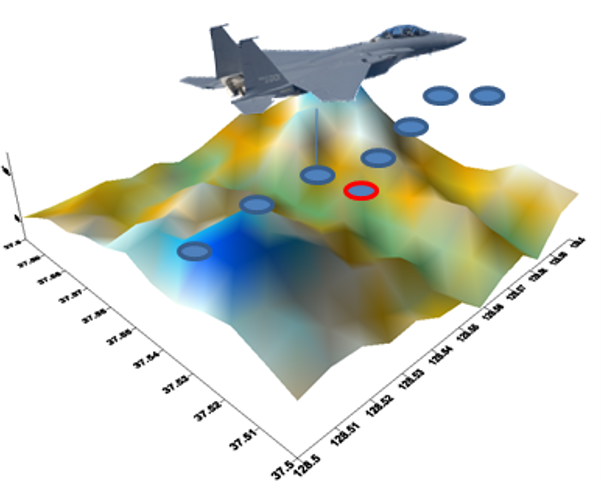

< (왼쪽부터) 지형참조항법, 영상기반의 목표물 추적 연구 >
5. 인공지능(AI)을 활용한 항공우주분야 연구
지도학습 기반의 영상대조 항법, 강화학습 기반의 유도 시스템 등 핵심 유도 항법 제어 알고리즘을 인공지능과 연계하여 다양한 항공우주분야 플랫폼에 접목하는 연구를 수행하고 있습니다. GPS 음영지역에서의 항법, 목표물 자동 인식 및 근접 유도, 실내 환경에서 충돌회피 등의 연구를 하고 있습니다.
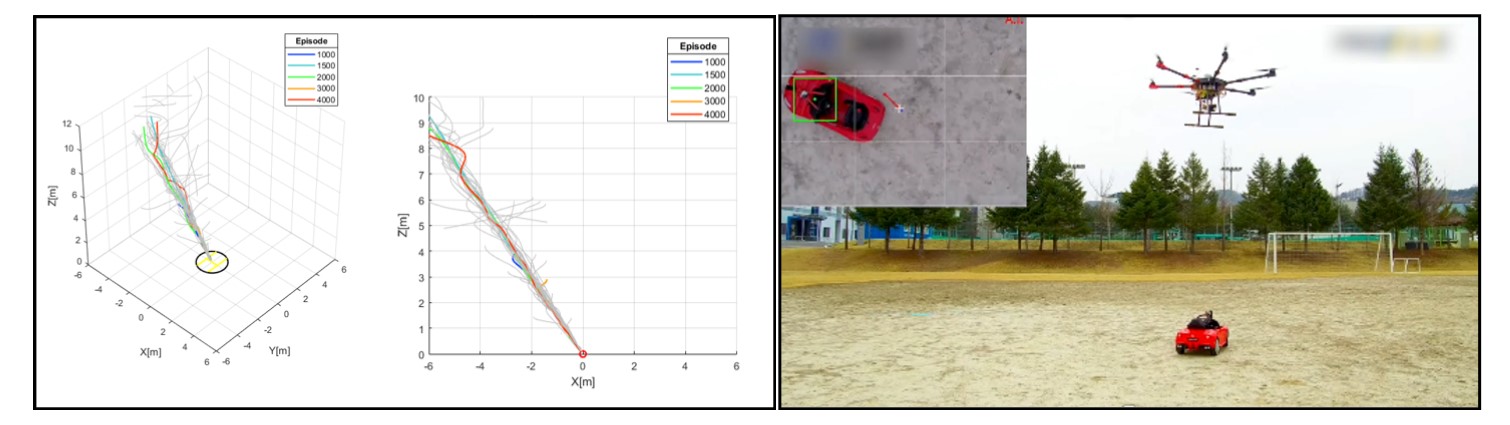
< 강화학습을 이용한 UAV 자동 착륙 실험 장면 >
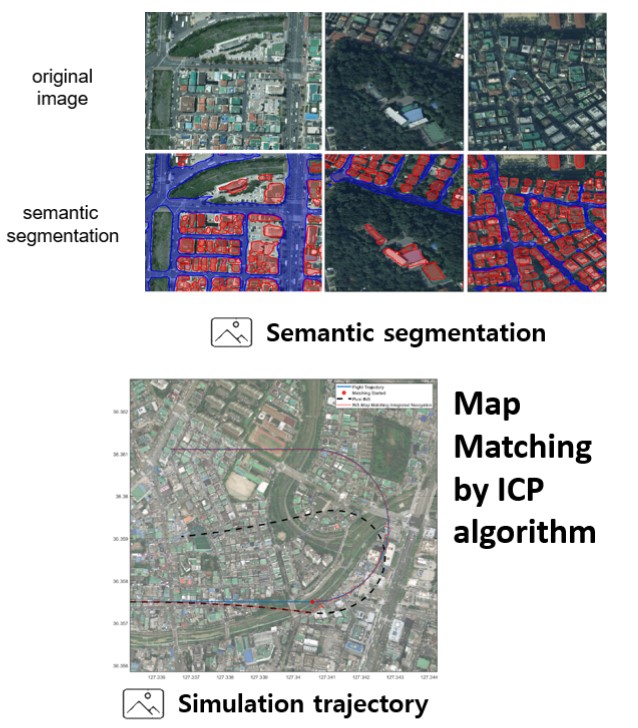
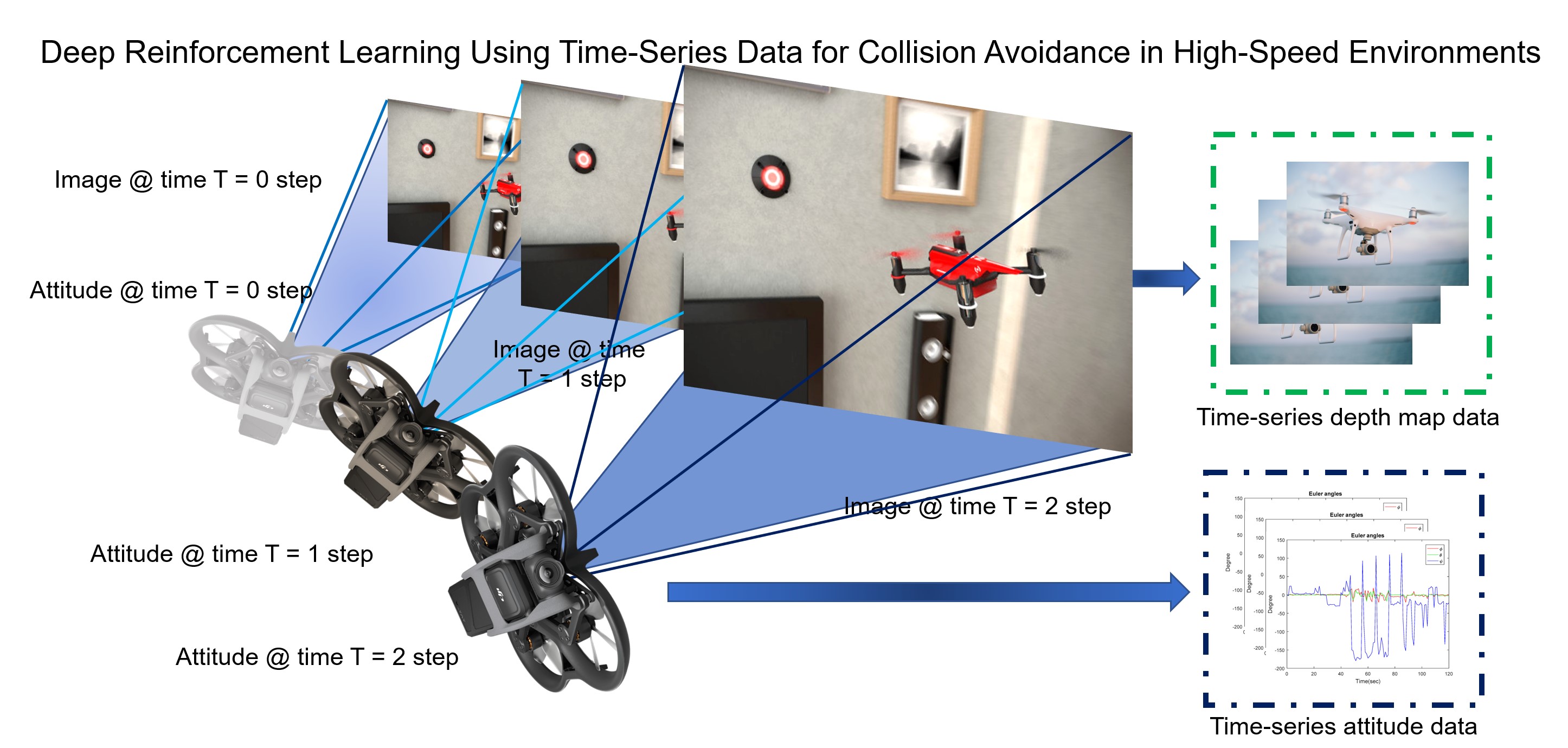
< (왼쪽부터) AI를 이용한 영상기반 대조 항법, 강화학습을 이용한 충돌회피 >
![]()
원문 이동우[cin6474@kaist.ac.kr]
편집 김태현[kth95@kaist.ac.kr]
황용하[yhhwang993@kaist.ac.kr]
Comment 0
- Total
- 56호
- 55호
- 54호
- 53호
- 52호
- 51호
- 50호
- 49호
- 48호
- 47호
- 46호
- 45호
- 44호
- 43호
- 42호
- 41호
- 40호
- 39호
- 38호
- 37호
- 36호
- 35호
- 34호
- 33호
- 32호
- 31호
- 30호
- 29호
- 28호
- 27호
- 26호
- 25호
- 24호
- 23호
- 22호
- 21호
| No. | Subject |
|---|---|
| Notice | 자유기고 모집 |
| Notice | Fund Raising |
| 10 |
항공우주공학과 News
|
| 9 |
Fund raising
|
| 8 |
특집 인터뷰 (방효충 교수)
|
| » |
연구실 탐방 (항공우주시스템 및 제어 연구실, ASCL)
|
| 6 |
동문 인터뷰(한국산업기술평가관리원 박훤 우주항공PD)
|
| 5 |
Photo Album
|
| 4 |
학부생 소식
|
| 3 |
신규 사업 소개 (초저궤도 시스템 검증용 광학위성 개발)
|
| 2 |
Research Highlight (최지환 교수)
|
| 1 |
항공우주 이야기 (美 화성탐사선 ‘InSight’ 4년만에 임무 종료)
|