
신규연구사업소개
Distributed Cooperative Multi-Agent Planning over Information Space
“Distributed Cooperative Multi-Agent Planning over Information Space” 연구는 미국 공군과학연구실 (AFOSR: Air Force Office of Scientific Research)의 아시아 지역 담당 사무실 AOARD (Asian Office of Aerospace Research and Development)와 미공군연구소 (ARFL: Air Force Research Laboratory)의 공동지원으로 우리 학과 최한림 교수 연구진이 2016년 10월부터 3년간 수행되는 기초연구이다. 예산 규모는 3년간 총 15만불 규모이다.
2000년대 이후 항공분야에서의 무인화, 자율화 기술의 발달함에 따라, 다수의 무인기를 활용하여 편대, 군집 비행을 수행하거나, 더 나아가서 무인기 팀의 자율적인 협업을 통해 임무를 수행토록하는 기술에 대한 연구가 활발히 이루어져왔다. 특히, 후자의 경우 임무 계획, 작업 계획이라는 연구 주제로 연구가 이루어져 왔으며, 최한림 교수 연구진을 포함하여 선도적인 연구 그룹에서는 그 동안 중앙집중적인 의사 결정 방식이 아닌 분산화된 의사 결정 방식으로 임무 계획을 수행하기 위한 기법을 다각도로 개발해 왔다.
현재까지 개발, 제시된 이론과 알고리즘은 다종 무인이동체의 복합 협업 임무 계획에 적용되어 그 타당성이 검증되고 있다. 하지만, 아직까지도 이론 및 기법적으로 제대로 풀지 못한 난제가 남아 있으며, 그 대표적인 문제가 Information Space (정보 공간)에서의 분산 의사 결정 문제이다. 정보 공간의 개념을 무인기 활용 임무의 예로 설명하자면, 무인기에 카메라 혹은 레이다 센서를 장착하여 이동하는 표적을 추적하는 임무 상황을 생각해 볼 수 있다. 이 때 무인기 의사 결정의 목적은 표적에 대한 최대한 좋은 품질의 정보를 최대한 많이 얻는 것이 목표가 되어야 한다. 이러한 의사 결정은 지형 및 위험지역 고려, 충돌 대비와는 또 다른 차원의 문제에 해당하며, 정보의 양과 질을 최대화하기 위한 문제를 정보 공간에서의 의사 결정이라고 부른다.
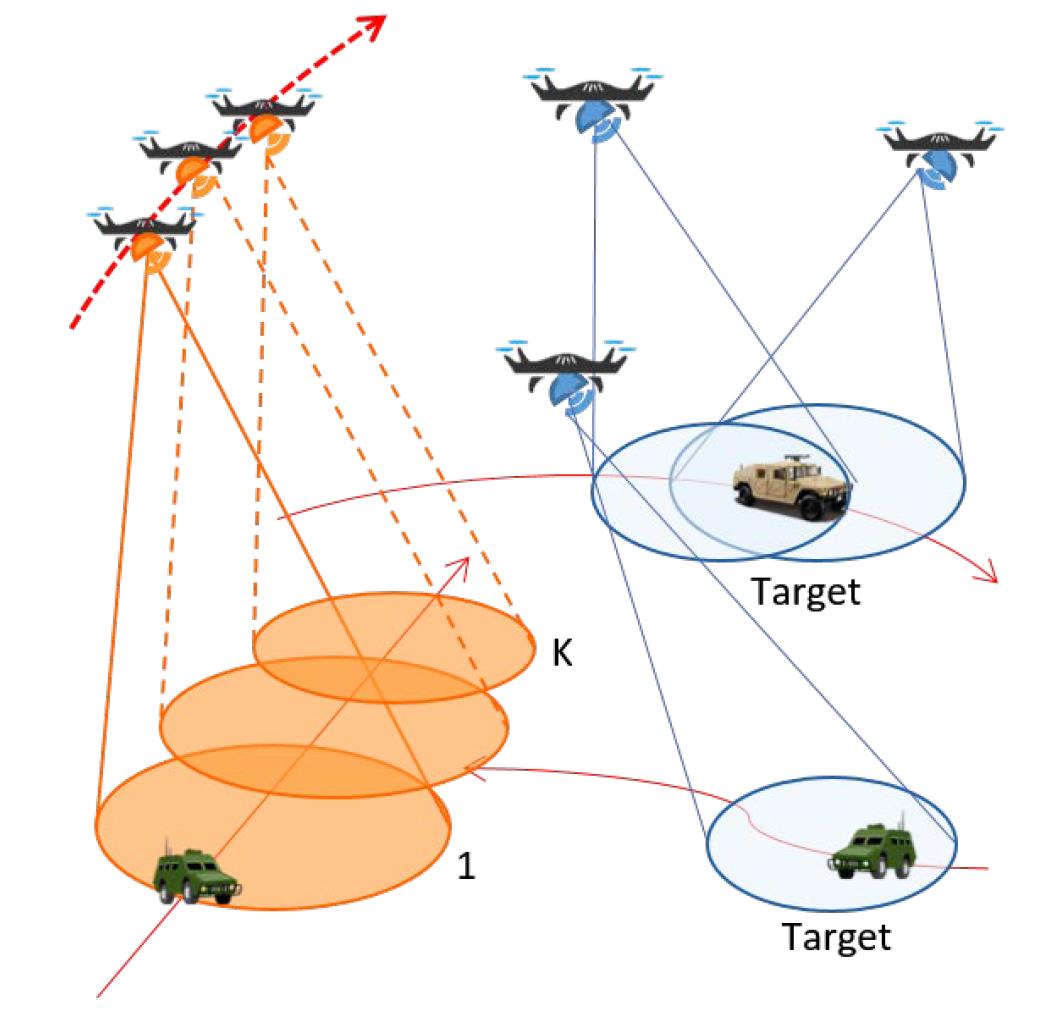
임무센서 탑재 다수 무인기의 경로계획: 정보 공간에서의 분산 의사 결정의 예
정보 공간에서의 의사 결정은 그 자체로서도 복잡도가 높은 문제이지만, 이를 분산화하는 데에는 더 큰 어려움이 따르는 문제이다. 정보 공간에서는 한 개체의 의사 결정이 다른 개체의 의사 결정과 더 강하게 커플링이 되기 때문이다. 예를 들어, 서로 다른 임무 센서를 탑재한 두 대의 무인기가 단일한 표적을 관측하는 상황을 생각해 볼 때, 물리적 공간에서는 두 무인기가 서로 충돌하지 않도록 설정하면 둘의 경로를 분리해서 정할 수 있다. 하지만, 정보 공간 측면에서 한 무인기가 표적에 대해 어떤 정보를 획득했는지에 따라 다른 무인기의 센서의 기여도가 크게 달라지게 된다. 이러한 연관성은 단일한 표적의 운동이 아니라 기상현상, 화염과 같이 공간적으로 퍼져 있는 대상을 관측하는 경우에는 더욱 크게 나타나서 정보 공간에서의 의사 결정을 매우 어렵게 하는 요소이다.
본 연구에서는 커플링이 심한 정보 공간에서의 분산 의사 결정을 위해, 게임 이론과 분산 학습 기법을 활용하고자 하며, 아래의 세 가지 기술적 문제 (Technical Problem)을 상정하여 연구를 진행 중이다.
- [TP1] 정보 보상치 (Information Reward)의 분산 최대화: 상호 정보량 (mutual information)과 같이 센서에 의해 획득되는 정보의 양을 정량화 할 수 있는 지표를 확립하고, 분산된 환경에서 상호 통신/정보교환을 최대화 할 수 있는 분산 최적화 구조를 제시하고자 한다.
- [TP2] 계획 합의 (Plan Consensus)에서의 일반화된 분산 학습 기법: 계획 합의는 분산 환경에서 효과적인 작업/임무 계획을 수행하기 위해 본 연구진의 선행연구에서 구축한 틀이다. 이러한 틀에서 불확실한 파라미터, 개체별 보상치의 구조 등을 학습할 수 있는 분산 학습 기법을 제시함으로써 계획 합의의 틀이 정보 공간에서의 의사 결정으로 확장될 수 있도록 한다.
- [TP3] 비분리 보상함수 (Non-separable Reward)를 위한 포텐셜 게임 이론: 선행 연구를 통해 다양한 분산 의사 결정의 핵심이 되는 구조로 포텐셜 게임의 구조가 적합함을 확인하고, 정보 공간에서의 의사 결정에서 필연적으로 수반되는 커플링을 포텐셜 게임의 구조에서 다룰 수 있도록 이론적인 확장을 모색하고자 한다.

포텐셜 게임을 이용한 분산 의사 결정의 성능 검증 예: 근최적해로 빠르게 수렴
본 연구를 통해서 구축된 이론과 알고리즘의 틀은 다수 무인기를 활용한 다양한 임무에서 임무 성능의 극대화를 위한 무인기 운용, 의사 결정, 경로 계획 등에 활용될 수 있을 것으로 기대된다.
![]()
편집 현종민[jmhyun08@kaist.ac.kr]
Comment 0
- Total
- 56호
- 55호
- 54호
- 53호
- 52호
- 51호
- 50호
- 49호
- 48호
- 47호
- 46호
- 45호
- 44호
- 43호
- 42호
- 41호
- 40호
- 39호
- 38호
- 37호
- 36호
- 35호
- 34호
- 33호
- 32호
- 31호
- 30호
- 29호
- 28호
- 27호
- 26호
- 25호
- 24호
- 23호
- 22호
- 21호