
신규 사업 소개
AI 진단 기반 항공기 로봇 검사시스템 개발 과제
우리 학과 이정률 교수 연구실이 국토교통부 2023년 AI 진단 기반 항공기 로봇 검사 및 정비기술 개발 사업의 신규과제 참여기관으로 선정되었다. 해당 과제의 연구기간은 2023년 4월부터 2027년 12월까지 총 57개월이다. 이정률 교수 연구실은 전체 연구기간 동안 약 71억원의 연구 개발비를 지원받으며, 로봇팔 및 자동화기술 기반 항공 MRO 검사 기술 및 진단 AI 기술을 개발할 계획이다.

< 이정률 교수 >
국내를 비롯한 전세계 항공운송의 수요는 코로나19 이후로 급증하는 추세이며, 이에 따라 국내 항공 정비에 대한 수요도 크게 증가할 것으로 예상된다. 국토교통부 “항공정비(MRO) 산업 경쟁력 강화방안(2021. 8. 12.)”에 따르면 국내 MRO 시장 규모는 2020년에 0.7조원 수준에 머물렀지만, 2030년에는 5조원 수준의 규모로 빠르게 성장할 전망이다. 하지만 기존의 국내 MRO 산업은 해외 기술에 크게 의존하는 노동력 투입 중심의 산업 구조를 갖기 때문에 이와 같이 급증하는 수요를 감당하기 어려울 것으로 예측되었다. 이정률 교수 연구실은 급증하는 국내 MRO 수요에 대응하기 위한 방법으로 자동화 기술 및 진단 AI 기술 기반의 MRO 검사 시스템을 제안하였다.
<자동화 기술 기반 지능형 항공기 비파괴 검사시스템 개발>
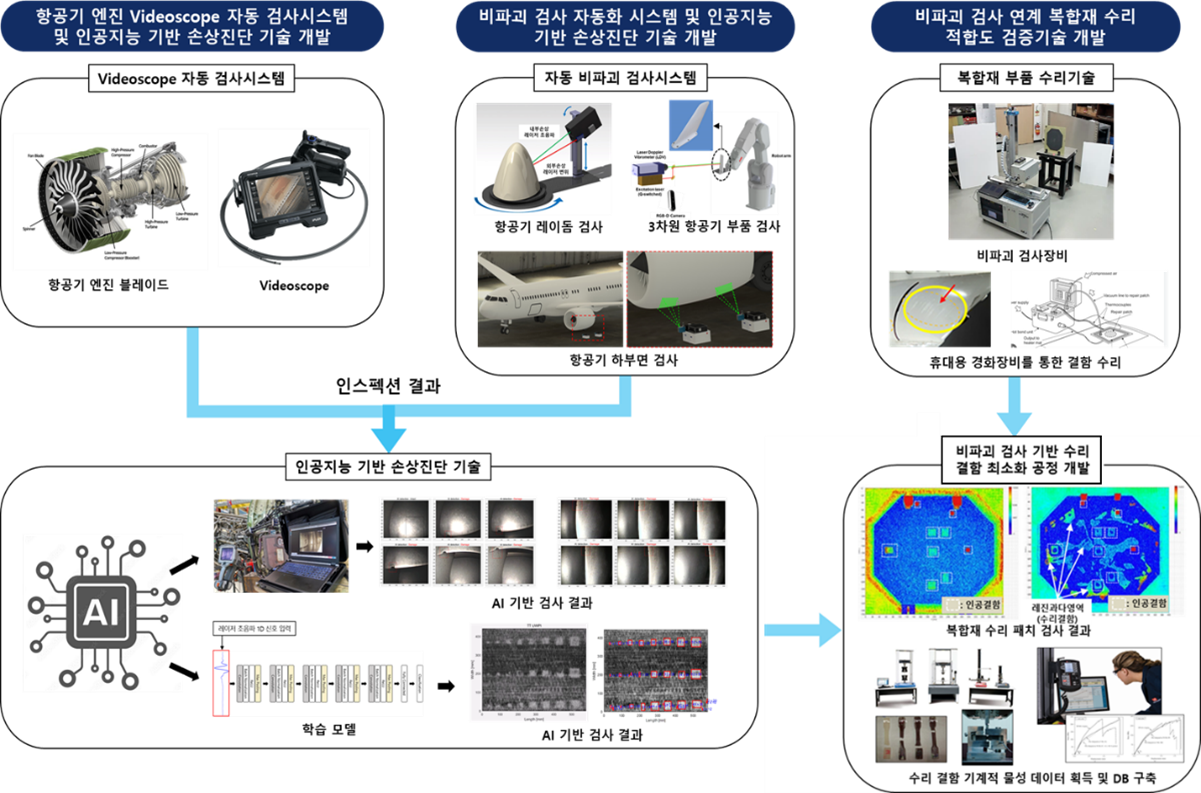
본 과제에서 이정률 교수 연구실은 총 4 종류의 검사 시스템을 개발할 계획이다. 검사 대상은 각각 엔진 블레이드, 레이돔(Radome), 플랩 페어링(Flap fairing), 엔진 카울링(Engine cowling)이며, 정비 수요와 검사 난이도를 종합적으로 고려하여 검사 대상을 선정하였다. 엔진 블레이드는 비디오스코프(Videoscope) 검사, 나머지 부품들은 레이저초음파 검사를 기반으로 한다. 엔진 블레이드 비디오스코프 검사에서는 컴퓨터 비전 기반의 영상 인식 기술을 활용하여 엔진 블레이드의 손상을 자동 탐지하는 것이 주요 연구 내용이다. 그 외 부품들에서는 복합재 구조물 내부 손상을 가시화하기 위한 레이저초음파 자동화 검사 시스템을 구축하고 진단 AI 기술을 통합하는 것이 주요 연구 내용이다.
항공기에서 탈거된 상태로 정밀 검사되는 레이돔과 플랩 페어링의 경우에는 다축스캐너, 로봇팔 등을 활용하여 자동화 검사 시스템을 구성할 계획이며, 행가(Hangar)나 계류장에서 현장 검사되는 엔진 카울링의 경우에는 SLAM(Simultaneous localization and mapping) 기반 로버에 검사 시스템을 탑재할 계획이다. 마지막으로 각각의 검사 시스템들은 실제 항공기 부품을 대상으로 각종 테스트를 거쳐 성능이 검증될 예정이며, 이는 대한항공에서 개발하게 될 외관 정비 드론 및 로버와 함께 항공 MRO 분야의 효율성 향상 및 혁신 가속에 크게 기여할 것으로 판단된다.
![]()
원문 이정률 교수[leejrr@kaist.ac.kr]
편집 김태현[kth95@kaist.ac.kr]