
Research Highlight (이창훈 교수)
- 국내 첫 민간 우주발사체 “한빛-TLV” 유도제어 S/W 개발 -
이번 Research Highlight에서는 우리학과 이창훈 교수 연구팀이 수행한 “한빛-TLV 유도제어 S/W 개발” 연구를 소개한다.

< KAIST AE 이창훈 교수 >
우리학과 이창훈 교수 연구팀이 유도제어 S/W 개발에 참여한 국내 첫 민간 우주발사체인 INNOSPACE의 한빛-TLV가 한국시간 2023년 3월 20일 오전 오후 2시 52분 브라질 알칸타라 우주센터에서 성공적으로 발사되었다.

< 한빛-TLV 발사 장면 및 발사체 주요 제원 >
비행체 유도제어분야는 선진국으로부터의 기술도입 및 협력이 불가능해 자체 기술 개발이 필요하며, 국방/우주를 중심으로 지속적으로 학술적/기술적 혁신이 요구되는 분야이다. 이창훈 교수 연구팀은 유도제어 분야의 기초적인 이론 연구부터 실제 시스템에 직접 활용될 수 있는 실용적인 기술을 지속적으로 개발하여 항공우주 산업체 및 관련 연구기관의 기술 개발을 지원하고 있다. 특히, 2020년 8월부터 2022년 9월까지 약 2년간 INNOSPACE에서 연구비를 지원한 “소형위성발사체 비행제어 알고리즘 및 성능분석 도구 개발” 연구과제를 통해 한빛-TLV의 유도제어 S/W 및 성능분석 프로그램 개발을 성공적으로 완료하였다.
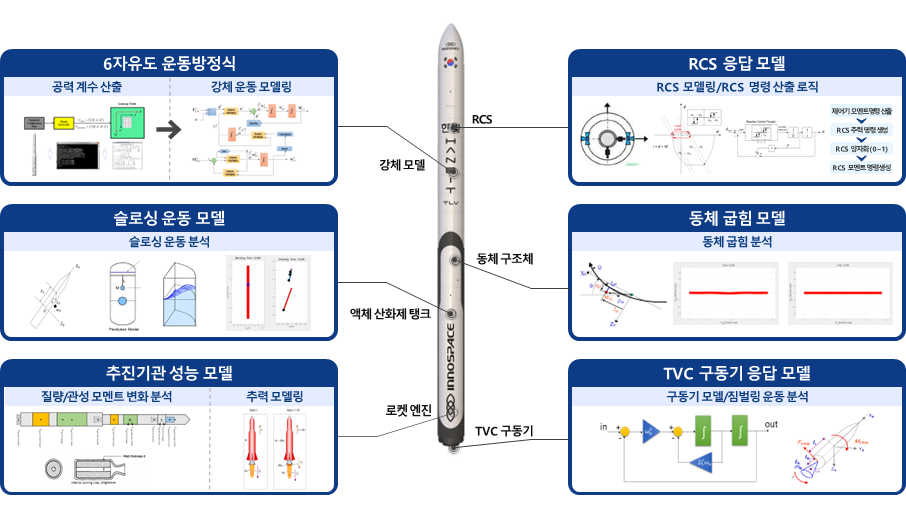
본 연구에서는 하이브리드 엔진(고체 추진제 + 액체 산화제)을 장착한 소형위성발사체의 비선형 동역학 모델링을 수행하였다. 위성발사체의 경우 탑재체 중량을 최대화하기 위해 경량 구조로 개발되며, 비행 중 동체에 작용하는 추력과 공력 힘에 의해 구조벤딩(Structural Bending)이 발생하게 된다. 또한 액체산화제의 경우 발사체의 자세 운동에 의해 출렁임이 발생하는데 이를 슬로싱(sloshing) 운동이라고 하며, 발사체의 추가적인 외란으로 작용한다. 발사체의 엔진은 큰 중량을 가지고 있기 때문에 TVC(Thrust Vector Control)에 의해 엔진이 움직일 때 동체에 영향을 주는데 이를 짐벌링 운동 또는 TWD(Tail Wags Dog) 운동이라고 한다. 이러한 운동효과를 모두 반영하여 소형위성발사체의 동역학 식을 도출하게 되는데 다른 비행체와 달리 동역학 식이 매우 복잡하다. 본 연구에서는 슬로싱/구조벤딩/짐벌링 운동이 결합 된 비선형 운동방정식 및 TVC/RCS(Reaction Control System) 구동시스템 모델, 추력 모델 및 공력 모델을 포함한 소형위성발사체 상세 동역학 모델링을 수행하였다.
< 한빛-TLV 발사 장면 및 발사체 주요 제원 >
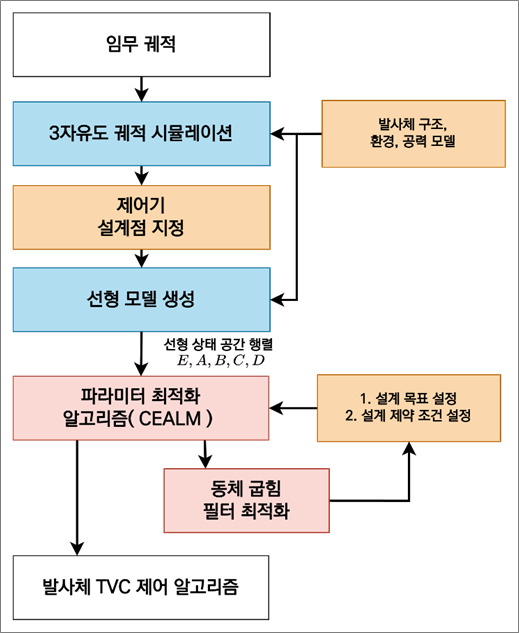
산출된 동역학 모델을 바탕으로 발사체 TVC 및 RCS 기반의 자세제어 알고리즘을 설계 하였다. TVC 자세제어 알고리즘은 일반적으로 피치/요축 제어를 위해 활용되며 PD 또는 PID 제어 개념을 활용한다. RCS 자세제어 알고리즘은 롤축 제어를 위해 활용되며, On-Off 추력기에 적합한 Schmitt Trigger 제어 개념을 활용한다. 발사체 자세제어 알고리즘 설계에서의 기술적 어려움은 발사체의 슬로싱/구조벤딩/짐벌링 운동의 고유주파수와 제어루프의 대역폭이 근방에 형성되어 설계가 매우 까다롭다는 것이다. 또한 구조벤딩에 의해 자세제어루프가 발산할 수 있기 때문에 이를 안정화하기 위한 노치필터의 설계가 필수적이다. 자세제어 알고리즘의 적절한 이득 선정과 노치필터 설계 파라미터 선정은 매우 복잡하기 때문에 본 연구에서는 연구팀이 자체 개발한 공진화 기반의 최적화기법인 CEALM(Co-Evolutionary Augmented Lagrangian Method)을 활용하여 자세제어 알고리즘의 설계 파라미터를 자동으로 결정할 수 있는 프로그램을 개발하였다. 자동화 설계 프로그램에서는 정밀한 자세제어 추종성능을 제공하면서 충분한 비행안정성을 확보하도록 하는 설계 파라미터를 자동으로 산출하게 된다.
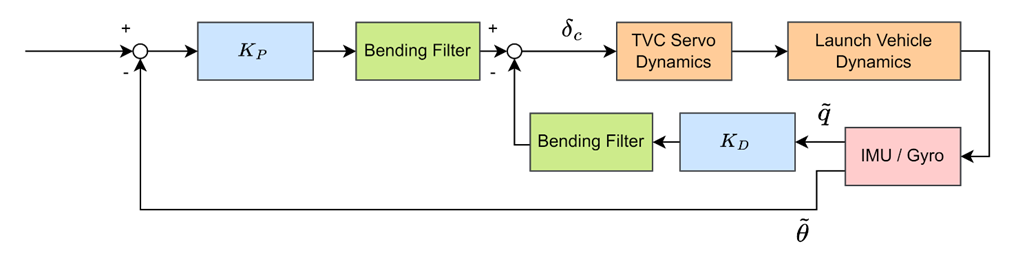
< TVC 자세제어기 구조 >
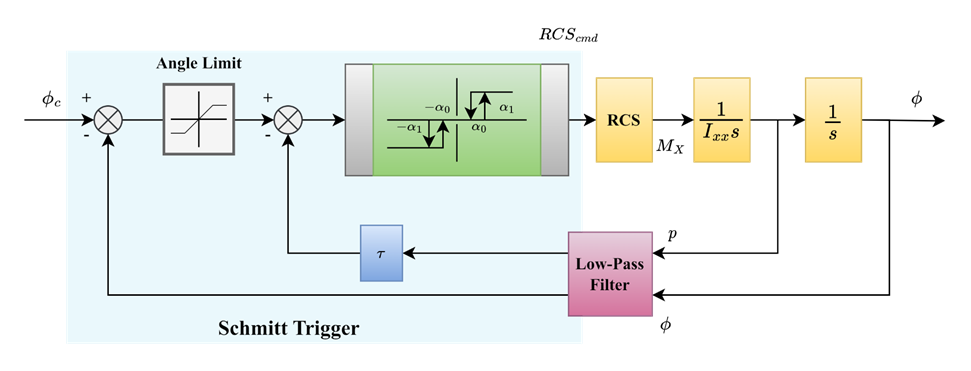
< RCS 자세제어기 구조 >
< 한빛-TLV 발사 장면 및 발사체 주요 제원 >
발사체는 상승비행 동안 큰 공력 하중을 받게 되며, 공력 하중이 가장 크게 작용하는 지점을 Max-Q, 또는 최대동압구간이라 부른다(참고: 일반적으로 동압을 Q로 표현하기 때문에 최대동압구간을 Max-Q라 표현함). 공력 하중에 의해 발사체 구조가 파괴되지 않도록 상승구간 동안에는 공력 하중을 경감시키도록 사전에 계획 된 자세각으로 비행하게 되며, 이를 피치 프로그램(Pitch Program)이라 부른다. 지대지 유도탄을 비롯해 발사체의 상승비행 단계 유도방법으로 널리 적용되고 있는 방식이다. 이를 위해 본 연구에서는 발사장 주변의 바람 계측 데이터가 주어질 때 공력 하중을 최소화 하는 방향으로 피치 프로그램 명령을 신속하게 산출하는 상승 궤적 최적화 프로그램을 개발하였다.
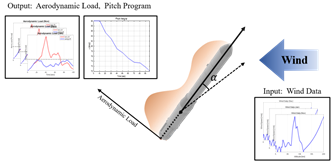
< 공력 하중 경감을 위한 상승 궤적 최적화 예시 >
또한 개발 된 유도 제어 알고리즘의 성능 검증을 위해 6자유도 성능 분석 프로그램을 개발하였다. 6자유도 성능 분석 프로그램에는 발사체의 상세 동역학 모델과 개발 된 유도제어 알고리즘 및 비행 상태를 판단하여 단계를 전환하는 모듈, 항법 모델 및 환경 모델 등으로 구성된다. 프로그램의 유지 보수를 원활하게하기 위해 모듈화 방식을 적용하였으며, 다양한 외란 요소에 대해 발사체의 성능을 확인할 수 있도록 Monte-Carlo 시뮬레이션 기능을 포함시켰다.
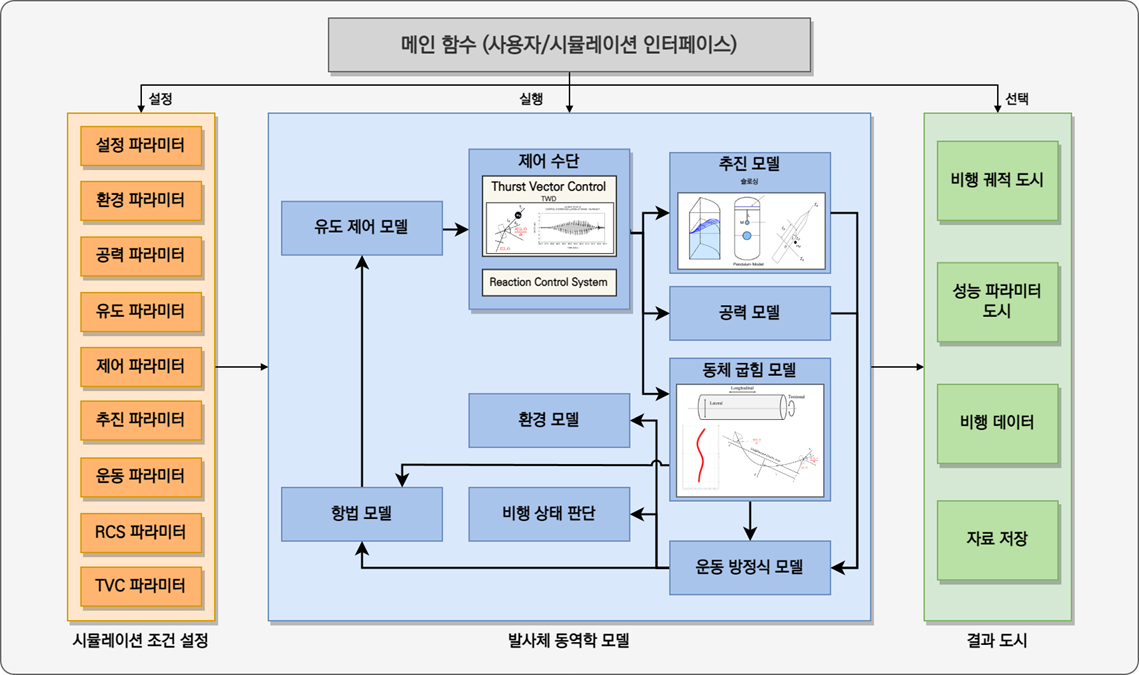
< 발사체 6자유도 성능 분석 프로그램 구조 >
이외에도 본 연구에서는 GPS/INS 통합항법 알고리즘, PILS/HILS용 실시간 코드, 위성 궤도 투입을 위한 3차원 Explicit 유도 알고리즘 등 소형위성발사체 유도제어에 필요한 핵심 알고리즘 개발을 수행하였으며, 비행시험을 통해 알고리즘의 정상동작 및 성능을 검증하였다.
이번 INNOSPACE의 한빛-TLV 발사가 성공하면서 국내에서도 민간이 우주 개발을 주도하는 뉴스페이스 시대가 본격적으로 개막했다는 평가를 받고 있다. 또한, 민간 기술을 통해 우주발사체 유도제어 기술 개발을 처음으로 성공했다는 점에서 큰 의미가 있으며, 대통령 및 과기부 장관의 축전을 받는 등 국가적으로도 의미 있는 연구개발성과로 인정받고 있다.
![]()
원문 이창훈 교수[lckdgns@kaist.ac.kr]
편집 김태현[kth95@kaist.ac.kr]