
Research Highlight
- 달 착륙선 달빛2호 (권세진교수님 연구실) -
착륙선 지상비행시험기의 필요성
착륙선 지상비행시험기는 착륙 관련 기술의 검증과 개발을 위해 우주 임무에 앞서 지상에서 실험하기 위해 운용하는 실험체입니다. 지상비행시험기는 지상에서 수직이착륙 비행하여 착륙 종말 단계인 동력 강화(Powered descent) 과정을 모사하며, 착륙선에 적용되는 유도 항법 및 제어, 위험 감지 및 회피 시스템, 센서 등의 검증 및 개발에 활용됩니다. 해외의 지상비행시험기 운용 사례로는 NASA의 Morpheus, Mighty Eagle lander, JAXA의 SELENE-B 등이 있으며, 비행 실험을 통한 성능 평가를 수행한 바 있습니다.
국내 개발 사례는 카이스트 로켓연구실의 달 착륙 추진 모듈과 한국항공우주연구원이 개발한 달 착륙 지상시험모델이 있습니다. 달 착륙 추진 모듈은 수직이착륙 비행 실험을 성공적으로 수행했지만, 모듈에 적용된 추력 제어 방식이 한국형 달 착륙선과 달라 상사성이 부족하고, 제어 알고리즘이 탑재되지 않아 수동으로 추력을 제어해야 하는 한계가 있었습니다. 달 착륙 지상시험모델은 실제 착륙선과 상사성을 갖도록 설계됐으며, 가상 비행 실험을 성공적으로 수행했지만, 독성 추진제인 하이드라진(N2H4)을 사용하는 추진 시스템이 유독한 추진제 및 배기가스를 외부에 유출할 수 있어 비행 실험을 진행하지 못했습니다.
지상비행시험기를 통한 착륙 기술 검증 및 개발을 위해서는 실제 착륙선과 상사성을 가지며, 친환경 추진제를 사용하는 지상비행시험기의 설계 및 개발이 필수적입니다. 항공우주공학과 로켓연구실은 한국형 달 착륙선과 하부 체계가 같으며, 친환경 추진제를 사용하고, 연구실 수준에서 운용 가능한 소형 지상비행시험기 시스템의 설계 및 개발을 수행했습니다. 설계 요건에 따라 추진 시스템, 구조체, 제어 알고리즘, 수직이착륙 실험 장치 등을 설계 및 개발했습니다.
착륙선 지상비행시험기 설계 과정
지상비행시험기는 추진 시스템을 포함한 다른 하부 체계를 착륙선과 최대한 일치시키면서, 연구실 수준에서 안정적으로 운용할 수 있도록 선정했습니다. 최대 이륙 중량은 40 kg 미만으로 제한했으며, 연구 개발의 기간과 비용을 낮추기 위해 상용 제품을 사용했습니다.
착륙선 지상비행시험기는 상승, 수평 기동 및 고도 유지(호버링), 하강, 연착륙으로 구성된 일련의 비행 시험을 통해 착륙 기술의 검증 및 보완이 목적으로 운용했습니다. 본 연구에서는 자세 제어와 수평 기동을 제외한 고도 변경 및 유지만을 수행하도록 임무 요건을 선정했고, 표 1과 같이 비행 시나리오를 선정했습니다. 지상비행시험기가 최대 상승 고도에 도달하면 호버링을 시작하며, 하강 기동을 모사할 수 있도록 비행 시나리오를 선정했습니다.
| Time (sec) | Maneuver type | Altitude (m) |
|---|---|---|
| 0 - 2 | Take-off | 0 2.0 |
| 3 - 10 | Hovering | 2.0 |
| 10 - 12 | Descent | 2.0 1.0 |
| 12 - 18 | Hovering |
1.0 |
| 18 - 20 | Descent + engine cutoff |
1.0 0.3 0 |
표 1. 지상비행시험기 비행 시나리오
지상비행시험기의 추진 시스템은 한국형 달 착륙선의 하부 체계와 상사성을 가지고, 운용 중 추력의 균일성을 확보하기 위해 고압 질소 가스를 이용한 가압식 사이클로 구성됐습니다. 목표 추진제 유량을 추력기로 주입하기 위해 고압 질소 가스가 약 150 bar로 충전된 탄소복합재 가압 탱크를 압력 레귤레이터와 체결해 추진제 탱크를 일정하게 가압하도록 했습니다. 소형 지상비행시험기의 추력기 선정은 한국형 달 착륙선과 달 착륙 지상시험모델의 추진 시스템 설계안을 반영하여 이루어졌습니다. 착륙선의 질량 및 활용도를 고려했을 때 비교적 작은 추력을 내는 다수의 추력기를 활용하는 방안을 선택했고, 달 착륙선에는 200 N 추력기 4기를 클러스터링 형태로 장착했습니다. 소형 지상비행시험기는 최대 이륙 중량을 40 kg 미만으로 제한했기 때문에 100 N 급 하강 추력기 4기가 클러스터링 형태로 지상비행시험기의 하단에 장착되도록 했고, 각 추력기의 개별 추력 차이에 의한 지상비행시험기 전도 현상을 방지하기 위해 최대한 무게 중심축에 가깝게 위치하도록 설계했습니다. 각 추력기는 펄스폭 변조 방식을 활용하여 추력을 제어하며, 대각선 반대 방향에 있는 추력기 2기가 하나의 세트를 이루어 동시에 작동합니다.
지상비행시험기의 구조체는 경량화를 위해 트러스 타입의 구조체 설계를 수행했습니다. 트러스 타입의 구조체는 탄소복합재 파이프와 같은 가볍고, 튼튼한 부품이 구조체의 버팀목(Strut) 역할을 하며, 금속 재질의 고정 장치(Fastener)가 추진제 및 가압 탱크 등의 추진 시스템의 주요 부품을 고정하는 특징을 가지고 있습니다. 설계 및 개발 후 측정한 최대 이륙 중량은 약 27 kg 으로 초반에 선정한 설계 요건을 만족하는 것을 확인할 수 있습니다.
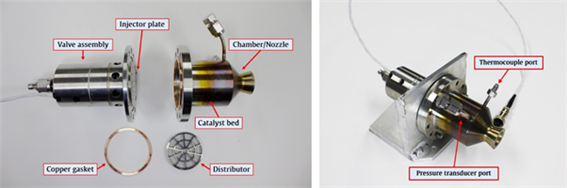
그림 1. 과산화수소 단일추진제 추력기
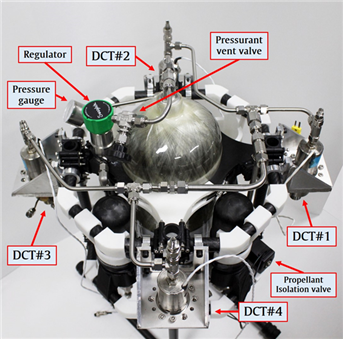
그림 2. 착륙선 지상비행시험기 추진 시스템
펄스폭 변조 (Pulse-Width Modulation) 추력 제어는 추력기 전단에 위치한 밸브의 개폐를 결정하는 on-off 전기 신호의 펄스 폭을 변조함으로써 평균 추력을 조절하는 방식입니다. 일정한 주파수로 반복적인 개폐 작동을 하는 밸브는 한 주기에서 on 신호가 차지하는 비율을 나타내는 사용률(Duty Cycle)이 증가함에 따라 상대적으로 밸브가 개방하는 시간이 늘어나고, 추진제가 추력기에 더 많이 주입되게 되어 평균 추력이 증가시킵니다. 본 연구에서 사용한 밸브는 ㈜스페이스솔루션 사의 PWM 밸브로, 10Hz 주기로 작동시켰으며 사용률 구간 20 – 80%에서 효과적으로 추진제 유량 제어를 할 수 있는 것을 확인할 수 있었습니다.
착륙선 지상비행시험기의 비행 제어 시스템
지상비행시험기의 비행 제어 시스템은 고도의 변경 및 유지를 목적으로 설계되었으며, 현 상태에서는 자세의 안정화와 수평 이동을 위한 자세 변경 등은 고려하지 않았다. 제어 시스템은 크게 센서부, 구동부, 알고리즘부로 나눌 수 있습니다.
센서부에서는 지상비행시험기의 고도와 속도, 자세를 측정하기 위해 관성 센서(IMU)와 LIDAR 거리 측정기, GPS 등이 포함되어 있으며, 가볍고 저비용으로 구할 수 있는 상용 부품을 선정하여 사용했습니다.
구동부는 100 N 급 과산화수소 단일추진제 하강 추력기 4기를 클러스터링 형식으로 묶어 사용하도록 했으며, 대각선 반대 방향에 위치한 추력기들이 쌍을 이루어 작동하도록 했습니다. 총 2 세트의 추력기 조합 중, 하나는 정상 상태로 작동하거나 작동 중지 상태로 운용되는 반면, 다른 한 세트는 지속적으로 펄스 운용을 통해 추력을 제어하는 방식을 사용했습니다.
제어 알고리즘은 Matlab Simulink를 이용하여 설계 후 시뮬레이션을 통해 검증했으며, 앞서 설정한 비행 시나리오에 따라 고도를 변경하게 됩니다. 위치 제어기는 요구되는 위치 추종을 위해 필요한 추력의 크기를 결정하는 부분이고, 하강 엔진 제어기는 계산된 추력 명령을 이행하기 위해 하강 추력기의 on-off 신호를 생성해내는 부분입니다. 제어 값 계산은 PD 제어 방식을 사용하여 구현했으며, 추력기의 on-off 신호는 펄스폭 변조 방식을 이용하여 생성했습니다. 알고리즘에서 필요한 실시간 지상비행시험기 질량 값은 설계된 추진 시스템의 실매질 실험을 통해 축적한 데이터를 활용하여 계산했습니다.
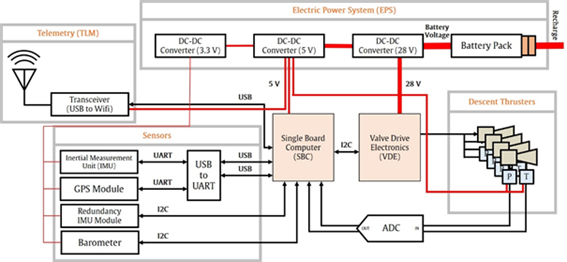
그림 3. 착륙선 지상비행시험기 전장품 개략도
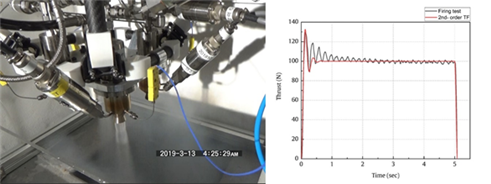
그림 4. 착륙선 지상비행시험기 추진 시스템 Mock-up 연소 실험 및 결과
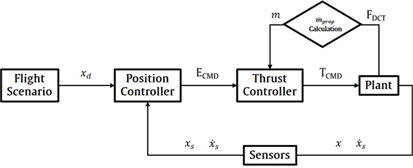
그림 5. 착륙선 지상비행시험기 비행 제어 알고리즘

그림 6. 제작된 착륙선 지상비행시험기 달빛 1호
실험 결과
연소 실험 결과를 기반으로 수행한 컴퓨터 시뮬레이션 결과 설계된 착륙선 지상비행시험기가 임무 요건을 충족시키며 안정적으로 계획된 궤적을 추종하는 것을 확인할 수 있었습니다. 또한 수직 비행 시험장치를 이용하여 지상비행시험기의 비행 실험을 수행했고 추진 시스템을 활용하여 2m 고도까지 이륙하는 것을 확인했습니다.
향후 실험에서는 제작한 비행 제어 시스템을 활용하여 앞서 선정한 비행 시나리오에 맞춰 수직 이착륙 비행 실험을 수행할 예정입니다.
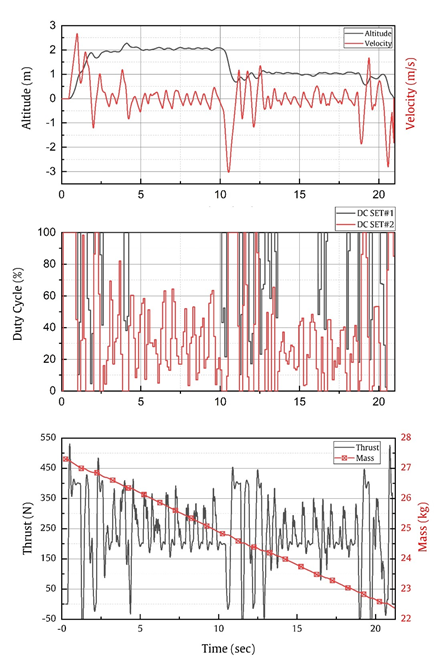
그림 7. 착륙선 지상비행시험기 비행 시뮬레이션 결과

그림 8. 착륙선 지상비행시험기 수직 이착륙 비행 검증 실험
![]()
원고 최석민[csm9420@kaist.ac.kr]
편집 박진우[jinpark57@kaist.ac.kr]
Comment 0
- Total
- 56호
- 55호
- 54호
- 53호
- 52호
- 51호
- 50호
- 49호
- 48호
- 47호
- 46호
- 45호
- 44호
- 43호
- 42호
- 41호
- 40호
- 39호
- 38호
- 37호
- 36호
- 35호
- 34호
- 33호
- 32호
- 31호
- 30호
- 29호
- 28호
- 27호
- 26호
- 25호
- 24호
- 23호
- 22호
- 21호
| No. | Subject |
|---|---|
| Notice | 자유기고 모집 |
| Notice | Fund Raising |
| 9 | Photo Album |
| 8 |
특집인터뷰 (윤효상 교수)
|
| 7 |
연구실탐방 (Rocket Lab.)
|
| 6 |
동문소개 (울산대학교 이주호 교수)
|
| 5 |
해외탐방 기고문 (UT Austin)
|
| » |
Research Highlight
|
| 3 |
항공우주공학과 News
|
| 2 |
신규사업 소개
|
| 1 |
학부생 소식
|