
연구실 탐방(GNSS 지도교수 : 이지윤)

위성항법시스템 연구실(Global Navigation Satellite System Lab, GNSS Lab)은 이지윤 교수님의 지도 하에 현재 10여명의 학생들이 함께하는 연구실입니다. 연구실 이름에서 알 수 있듯이 위성항법시스템과 연관된 다양한 연구를 수행하고 있습니다. 수행 중인 대표적인 연구인 무인기 항법시스템 연구, 다중센서 융합시스템의 무결성 보장 연구, 위성항법시스템 기반 응용 연구를 차례로 소개합니다.
- 무인기 항법시스템 연구
최근 드론과 같이 무인기의 운용이 점점 보편화되면서, 안전한 무인기 운용에 대한 중요성이 높아지고 있습니다. 이를 위해 GNSS 연구실에서는 무인기용 지역보강항법시스템을 개발하여 고정밀/고신뢰성 항법해를 제공하는 연구를 하고 있습니다. 지역보강항법시스템은 미리 알고 있는 고정점에 위치한 기준국에서 위성항법시스템 신호의 오차를 추정해 인근의 GNSS 사용자들에게 제공함으로써 무인기로 하여금 상당히 정밀한 항법을 확보할 수 있게 합니다. 또한, 이 시스템에서는 실시간으로 위성항법시스템의 고장을 감시하고 여러 요인으로 인한 오차의 크기를 가늠할 수 있는 위치해의 불확실성 수준을 계산합니다. 이러한 항법 정보를 활용해 항법 시스템이 만족해야 하는 성능요구조건을 정립하고 무인기의 운용 가능 범위를 정의할 수 있습니다.

그림 1. 항법 성능에 따른 무인기 운용 개념 예시
다수의 무인기 운용 상황에서 최소 분리거리라는 개념을 통한 안전성 보장에 대한 연구를 수행하고 있습니다. 분리거리는 무인기 간 떨어져 있어야 하는 물리적인 거리를 의미하며, 이를 결정하는 핵심적인 요소에는 무인기의 항법 시스템의 오차와 비행기술 상의 오차가 있습니다. 이러한 분리거리 추정을 위해, 항법 시스템의 오차와 비행기술로 인한 오차를 모델링하고, 무인기 사고로 인해 인명피해가 발생할 수 있는 위험성 확률 평가 연구를 수행합니다.
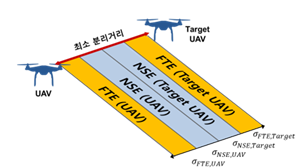
그림 2. 무인기 간 최소 분리거리 개념도
- 다중센서 융합항법 및 무결성 연구
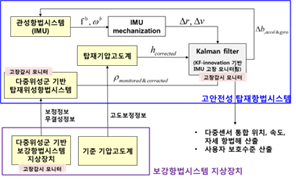
다중센서 융합항법 시스템이란 위성항법시스템 또는 관성센서와 같이 서로 다른 특성을 지닌 다양한 종류의 센서를 융합하여 높은 항법 정확도와 강건성을 확보할 수 있는 항법 시스템을 말합니다. 최근 드론 및 자율주행차와 같이 다양한 임무 환경에서 높은 성능의 항법 시스템이 요구됨에 따라 다중센서 융합항법 시스템의 활용 가치가 크게 대두되었습니다. GNSS 연구실에서는 이러한 다중센서 융합항법 시스템을 활용하는 사용자의 안전성을 보장하기 위해 센서 측정치 기반 이상치(outlier) 검출 알고리즘 개발 또는 통계적 분석에 기반한 위치 불확실성 추정, 다중센서 융합항법시스템 아키텍처 설계에 관한 연구를 수행하고 있습니다.
 |
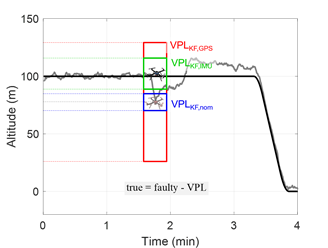 |
| 그림 3. 다중센서 융합항법시스템 알고리즘 예시 | 그림 4. 융합 항법 시스템의 항법해 불확실성 수준 |
- 위성항법 시스템 기반 응용 연구
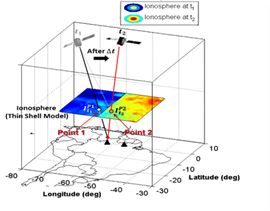
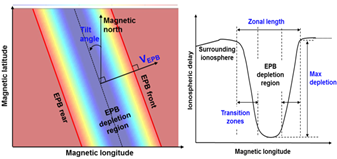
위성항법시스템 신호의 오차를 유발하는 가장 큰 요인은 전리층입니다. 태양 활동이 발생할 시 위성항법시스템의 성능이 크게 떨어지기도 합니다. 이러한 관계를 통해, 역으로 위성항법시스템 신호를 이용해 전리층에 분포한 전자의 밀도, 이상 현상의 파악 등 특성을 파악할 수 있고, 이러한 정보들을 위성항법시스템을 활용하는 항공기 사용자들의 안전성 보장에 활용할 수 있습니다. 특히 전리층은 지자기적 특성에 따라 변화 양상 및 이상 현상의 발생 규모, 빈도 등이 다르게 나타나게 됩니다. 일반적으로 위도에 따라 지자기적 특성이 달라지는데, 기존의 수행된 연구는 위성항법시스템의 활용 수요가 가장 큰 중위도 지역에 초점이 맞춰져 있었습니다. 최근 남미, 동남아시아 지역 등 저위도 지역에서 항공 수요량이 매우 증가함에 따라, GNSS 연구실에서는 저위도 지역의 전리층 분석 연구를 수행하고 있습니다. 이러한 연구에는 저위도 지역의 전리층 경사도 추정 기법 개발, 정상상태 전리층 오차 통계치 모델링, 대표적인 이상 현상인 플라즈마버블에 대한 위협 모델 구축 등이 포함됩니다.
|
|
|
| 그림 5. 저위도 전리층 경사도 추정 기법 | 그림 6. 플라즈마 버블 파라미터 정의 |
![]()
원문 김동우 [kdwx@kaist.ac.kr]
편집 이슬 [animecult@kaist.ac.kr]
Comment 0
- Total
- 56호
- 55호
- 54호
- 53호
- 52호
- 51호
- 50호
- 49호
- 48호
- 47호
- 46호
- 45호
- 44호
- 43호
- 42호
- 41호
- 40호
- 39호
- 38호
- 37호
- 36호
- 35호
- 34호
- 33호
- 32호
- 31호
- 30호
- 29호
- 28호
- 27호
- 26호
- 25호
- 24호
- 23호
- 22호
- 21호
| No. | Subject |
|---|---|
| Notice | 자유기고 모집 |
| Notice | Fund Raising |
| 9 | Photo Album |
| 8 |
기부자 인터뷰
|
| 7 |
항공우주공학과 News
|
| 6 |
신규사업 소개
|
| 5 |
학부생 소식
|
| 4 |
해외탐방 기고문 (보잉 해외 연수 기고문)
|
| 3 |
항공우주 핫이슈 (우주의 호텔, 팽창형 오두막)
|
| 2 |
특집인터뷰 (이창훈 교수)
|
| » |
연구실탐방 (Global Navigation Satellite System Lab.)
|