
연구실 탐방(ASCL 지도교수 : 방효충)


항공우주시스템 및 제어 연구실(ASCL - Aerospace System and Control Lab)은 방효충 교수님의 지도하에 30여명의 인원이 속한 연구실로 항공과 우주 양 분야에서 다양한 연구를 수행하고 있습니다. ASCL에서는 제어 알고리즘 혹은 path-planning 개발과 같은 기술적인 연구뿐만 아니라 이러한 기술들을 실제로 구현하기 위한 연구까지 병행하고 있습니다.
< 위성 팀 >
1. 초소형 큐브위성 개발
큐브 위성은 일반 위성과 비교했을 때 짧은 개발 기간과 저렴한 개발 비용으로 지상 관측, 통신, 대기 측정 등의 임무를 수행할 수 있어 최근 큐브위성의 발사가 점차 늘어나는 추세입니다.
A. LINK
LINK는 QB50프로젝트에 참여하여 개발한 ASCL의 첫 큐브위성입니다. LINK의 임무는 이온 및 중성자 질량 분광기(INMS)를 이용한 열권 및 이온층의 대기 관측을 수행하는 것으로 2017년 4월 18일 Atlas V에 탑재되어 발사 후 약 100일 간 지상국과의 업/다운링크 통신을 수행하였습니다.
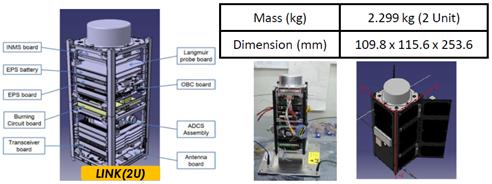
Fig 1. LINK 위성의 형상 및 제원
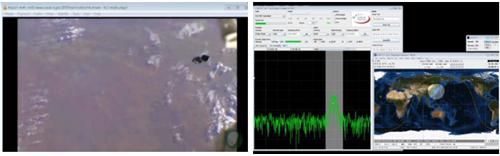
Fig 2. LINK 위성과의 통신 결과
B. K2SAT
K2SAT은 카이스트와 공군사관학교가 협력하여 개발한 3U 큐브위성입니다. K2SAT의 임무는 보이스 리피터를 통한 음성 통신 및 카메라 모듈을 이용한 지상 관측입니다. 항공우주시스템에서 개발한 LINK와 비교했을 때 임무가 더 도전적이기 때문에 3축 자세제어가 가능한 자세결정 및 제어 시스템(ADCS) 모듈을 탑재하였습니다. 또한, S-band 다운링크를 수행하여 30m/pixel급 이미지를 지상으로 송신하도록 하였습니다. 2018년 12월 2일 Spaceflight사의 Falcon 9에 탑재되어 발사되었고, 2018년 12월 8일 독일에서 최초 비콘 수신이 되었지만, 이후 배터리 방전으로 추정되는 문제로 더 이상 신호 수신에는 실패하였습니다.
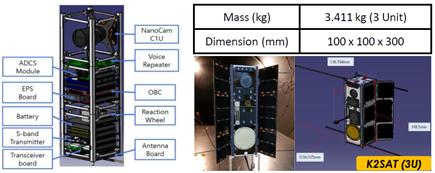
Fig 3. K2SAT의 형상 및 제원
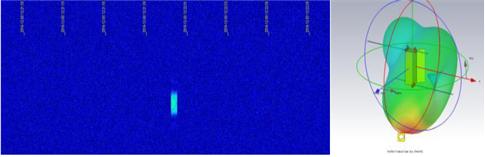
Fig 4. K2SAT의 초기 비콘 수신(독일2018.12.08._14:53:53)
2. 우주탐사 연구
A. 달 착륙 지상 검증 플랫폼 설계 및 구축
달 착륙은 20세기 중반 미국과 소련의 치열한 군비 경쟁 속 우위를 점할 수 있는 지표가 되었고, 결국 아폴로 계획에 의해 인류는 달에 성공적으로 첫 발을 내딛게 되었습니다. 최근에는 달에 매장된 희귀 자원 채취, 심우주 탐사를 위한 전초 기지 건설 목적으로도 달 탐사를 시도하고 있습니다. ASCL에서는 달 착륙 과정에서 필요한 항법 시스템(위험지형감지 및 회피, 크레이터 매칭 지형 상대 항법 등)을 개발하였고 온보드 상에 구현하여 지상 테스트 시험을 통해 이를 검증하였습니다.

Fig 5. 센서 인터페이스 및 항법 알고리즘 온보드 소프트웨어의 예시
B. 우주탐사 유도항법제어기술 연구
행성 착륙, 지구 관측 등의 우주탐사 수행 시 필수적으로 고려해야 할 세 가지 분야가 있습니다. 첫째, 최소 연료 소비를 통해 원하는 지점으로 이동할 수 있도록 궤적 최적화를 위한 유도기술. 둘째, 현재 우주비행체의 위치, 자세, 속도 등을 파악하기 위한 항법기술. 마지막으로 우주 비행체가 탐사하고자 하는 지점의 지향을 위한 자세제어/궤도제어 기술로 ASCL에서는 2000년 초반부터 심도 있게 유도항법제어기술을 총망라하여 연구한 경험이 있습니다.
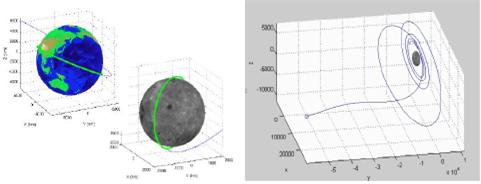
Fig 6. 달 탐사 및 착륙 궤적 최적화 예시
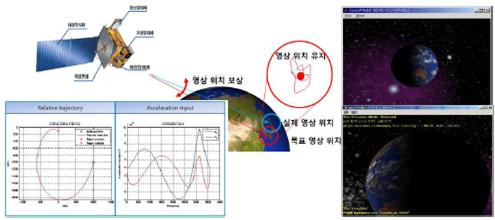
Fig 7. 영상기반 인공위성 오차보상 및 유지기술 연구
< 무인기 팀 >
항공 분야에서는 4차 산업혁명의 한 갈래로서 다양한 연구 분야와의 연계 연구가 진행되는 무인항공기를 다루고 있습니다. 2001년 방효충 교수님의 KAIST 부임 이래 선도적으로 수행되어온 무인항공기 관련 연구는, 전통적인 관점에서의 유도, 제어 및 항법 기법뿐만 아니라 최근 각광받고 있는 인공지능 관련 연구를 접목하여 안전하고 효율적인 무인항공기 시스템을 목표로 다양하게 수행하고 있습니다. 또한 일반적으로 고려되는 소형 무인항공기 시스템에서 벗어나, 도래할 근미래에 개인운송수단으로 주목받고 있는 대형 드론에 대한 연구 또한 진행하고 있습니다.
3. 전통적인 무인항공기 유도, 제어 및 항법 기법
무인항공기의 운용을 위해 기본적으로 전제되어야 하는 세 요소로 유도, 제어 및 항법이 제시됩니다. 유도란 무인항공기를 원하는 경로를 따르거나, 원하는 위치로 이동시키기 위한 명령을 생성하는 것을 의미합니다. 이를 위해 주어진 시간, 위치 등에서 무인항공기가 취해야하는 속도, 자세 등이 유도 기법의 결과물이 됩니다. 여기에 특정 임무를 수행하기 위해 무인항공기가 비행해야하는 경로를 생성하는 것 또한 유도 분야에 포함됩니다.
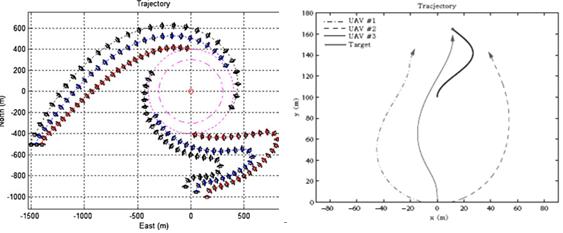
Fig 8. 벡터 필드 기법을 이용한 다수 무인기의 회전 기동 유도 (왼쪽) 목표의 데이터 획득을 위한 다수 무인기 협력 경로 생성 (오른쪽)
제어란 무인항공기의 자세, 위치, 속도 등을 원하는 값이 되도록 말 그대로 제어하는 것을 의미합니다. 이를 위해 멀티로터 형 무인항공기들의 모터 회전속도를 조절하거나, 고정익 무인항공기의 타면 각도 및 추진 모터의 속도를 조절하는 등 작동기(actuator)를 조절하게 됩니다.
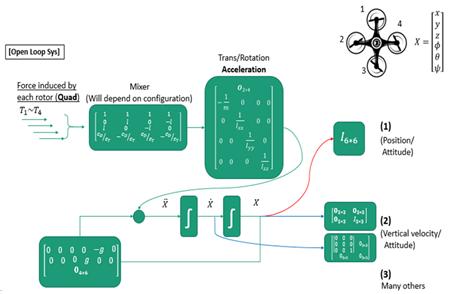
Fig 9. H-Inf 제어 기법을 이용한 쿼드로터 무인항공기 제어 기법 연구

Fig 10. 제어 기법 실험을 위한 실험테스트베드
항법이란 무인항공기의 현재 위치, 속도, 자세 등의 상태 변수에 대한 정보를 얻는 것으로써, 무인항공기 시스템을 운용하기 위한 근거가 됩니다. 기본적으로 무인항공기 시스템에는 관성항법장치와 GPS 등의 항법 장비가 장착되어 이를 수행하지만, 내재된 여러 단점들을 보완하기 위해 영상을 주축으로 한 다양한 항법 시스템이 연구되고 있습니다.
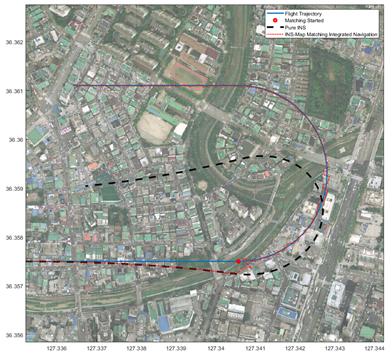
Fig 11. 지도 정보를 결합한 항법 시스템의 성능 검증
4. AI를 결합한 무인항공기 시스템 연구
앞서 소개한 전통적인 무인항공기 시스템 관련 연구 분야에 더해 최근 AI를 결합한 다양한 연구들이 수행되고 있습니다. ASCL에서 수행되었던 대표적인 연구 성과를 소개하면 아래와 같습니다.
A. 강화 학습을 이용한 무인항공기 자동 착륙 연구
착륙 과정은 항공기 운용 과정에서 가장 난이도 높은 과정으로, 자동화를 통해 사고를 낮출 수 있을 뿐만 아니라 전체 임무를 자동화할 수 있는 장점을 갖습니다. 이를 위해 강화 학습 기법을 적용하여 바람, 센서 오차 등의 불확실성 하에서 학습을 수행, 착륙을 임무를 자동으로 수행하는 연구를 진행하였습니다.
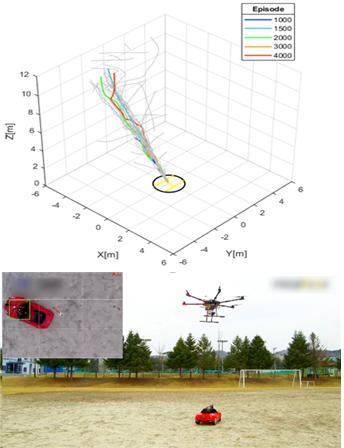
Fig 12. 자동 착륙을 위한 학습 진행 상황 (위)과 이를 적용하여 이동 목표에 자동 착륙하는 실험 모습 (아래)
B. 인공지능 기반의 항공 지도 데이터 매칭
무인항공기의 항법을 위한 절대 위치 정보를 얻는 한 가지 방안으로 상공에서 촬영한 지도 데이터와 기준이 되는 데이터베이스 내의 지도 데이터를 비교하는 지형 항법이 사용되고 있습니다. ASCL에서는 여기에 인공 지능을 적용하여 건물과 도로 등의 지형을 구분하여 매칭하는 연구 또한 진행하였습니다.
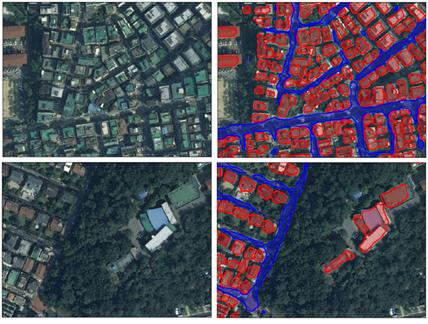
Fig 13. 학습된 네트워크를 통해 분류한 지도상에서의 건물과 길
![]()
편집 이재호[barbossa0412@kaist.ac.kr]
Comment 0
- Total
- 56호
- 55호
- 54호
- 53호
- 52호
- 51호
- 50호
- 49호
- 48호
- 47호
- 46호
- 45호
- 44호
- 43호
- 42호
- 41호
- 40호
- 39호
- 38호
- 37호
- 36호
- 35호
- 34호
- 33호
- 32호
- 31호
- 30호
- 29호
- 28호
- 27호
- 26호
- 25호
- 24호
- 23호
- 22호
- 21호
| No. | Subject |
|---|---|
| Notice | 자유기고 모집 |
| Notice | Fund Raising |
| 9 | Photo Album |
| 8 |
신규사업 소개
|
| 7 |
항공우주공학과 News
|
| 6 |
학부생 소식
|
| 5 |
학과 40주년 기념행사 연사소개(KAI, 이일우 상무)
|
| » |
연구실탐방 (Aerospace Systems and Control Lab.)
|
| 3 |
특집인터뷰 (탁민제 교수)
|
| 2 |
항공우주 핫이슈 (점점 다가오는 전기 비행기)
|
| 1 |
교환학생 에세이 (손대성 박사과정학생)
|